
Wie die persönliche Adresse eines zivilisierten Menschen in einem Adressbuch mit
Angabe von Land, Ort, Straße und Hausnummer hat auch jeder Punkt auf der Erdoberfläche
seine individuelle Adresse, die durch seine Koordinaten beschrieben wird. Mit dem GPS ist
es nun erstmals möglich, außer dem geographischen Breiten- und Längengrad auch die
dritte Koordinate, nämlich die Höhe mit ein und demselben Gerät zu erfassen.
Ein neues Navigationssystem
Sieht man einmal von den zwar recht präzisen, aber sehr teuren
Trägheitsnavigationsverfahren ab, so muss man sich, je nachdem, wo man sich auf der Erde
befindet und mit welchem "Gefährt" man unterwegs ist, eines anderen
Navigationsverfahrens bemächtigen. Für die Luftfahrt sind dies bevorzugt die NDBs, VORs,
DMEs und TACAN-Anlagen, für die Seefahrt LORAN, DECCA und OMEGA. Alle diese
Navigationsverfahren sind nur in einem mehr oder weniger begrenzten Gebiet verfügbar,
haben unterschiedliche Genauigkeiten und erlauben jedes für sich alleine keine
dreidimensionale Positionsbestimmung. Sie sind teilweise sehr groß, unhandlich, schwer,
teuer und "relativ" ungenau.
Es war klar, dass ein neues, allen bekannten Systemen überlegenes
Navigationsverfahren nur vom Weltraum aus über Satelliten betrieben werden konnte. Der
dafür notwendige, enorme finanzielle Aufwand war nur von den Verteidigungsministerien der
Weltmächte aufzubringen. Demzufolge wurde vom DepartmentOfDefense
(DOD) der Vereinigten Staaten von Amerika das
GPS-NAVSTAR-Satelliten-System und von der Sowjetunion das äquivalente GLONASS-Satelliten-System entwickelt. Das
Ergebnis war auf beiden Seiten ein Navigationssystem, das allen anderen bisher
entwickelten Systemen in vielerlei Hinsicht überlegen ist. Es ist bis in große Höhen
weltweit verfügbar, ermöglicht eine ununterbrochene Versorgung zu jeder Tages- und
Nachtzeit und dies bei jedem Wetter. Es liefert alle zur dreidimensionalen
Positionsbestimmung erforderlichen Daten und kann auch in Kriegszeiten nicht vom Feind
gestört werden.
Wenn man vom GPS spricht, meint man in der Regel das amerikanische NAVSTAR-System.
Deshalb werde ich das amerikanischen NAVSTAR-GPS im Folgenden nur noch einfach als GPS
bezeichnen. Die Unterschiede zwischen GLONASS und Navstar werde ich, soweit sie mir selbst
bekannt sind, an geeigneter Stelle nennen. Das grundlegende Prinzip ist für beide Systeme
dasselbe.
Das NAVSTAR - GPS - Konzept
Das GPS ist ein vom Verteidigungsministerium der Vereinigten Staaten von Amerika
DOD (Department of Defense) installiertes und betriebenes,
weltweit verfügbares Navigationssystem. In seiner vollen Ausbaustufe wird es aus 24
Satelliten bestehen, 21 aktiven Satelliten und drei Reservesatelliten. Die
Entwicklungskosten dafür betrugen bisher über 12 Milliarden US$.
| Tab.
6.1 GPS-Prototypen-Satellitenstatus vom April 1986 | |||
| Startnummer | Code | Startdatum | Status |
| B1-1 | 4 | 22.02.1978 | defekt |
| B1-2 | 7 | 13.05.1978 | defekt |
| B1-3 | 6 | 07.10.1978 | funktioniert |
| B1-4 | 8 | 11.12.1978 | funktioniert |
| B1-5 | 5 | 09.02.1980 | defekt |
| B1-6 | 9 | 26.04.1980 | funktioniert |
| B1-7 | 18.12.1981 | beim Start zerstört | |
| B1-8 | 11 | 14.07.1983 | funktioniert |
| B1-9 | 13 | 13.06.1984 | funktioniert |
| B1-10 | 12 | 08.09.1984 | funktioniert |
| B1-11 | 3 | 09.10.1985 | funktioniert |
Block 1
Die Entwicklung des Systems erfolgte in drei
Abschnitten, auch Blöcke genannt. Block 1 umfasste die Installation von 11
Prototyp-Satelliten. Diese (bis auf einen) wurden zwischen 1978 und 1985 in ihre
vorgesehenen Positionen gebracht. Davon hatten allerdings nur sieben den Betrieb
aufgenommen. Drei funktionierten überhaupt nicht und einer ging bereits beim Start zu
Bruch. Von den sieben funktionierenden GPS-Satelliten hatten nur drei überhaupt keine
Probleme, und von denen wiederum überschritten nur zwei die vorgesehene Lebensdauer von
fünf Jahren. Die anderen mussten durch ferngesteuertes Zuschalten redundanter Teile
repariert werden.
Die sieben funktionierenden Satelliten des Block 1 umkreisten nun die
Erde in jeweils 12 Stunden auf zwei Kreisbahnen, die um 60 Grad gegenüber der Erdachse
geneigt waren. Durch den Ausfall der vier erwähnten Satelliten war es nicht möglich,
einen lückenlosen Empfang der Signale zu erhalten. Die Konstellation war sogar so
ungünstig, dass einmal am Tage bis zu sechs Satelliten gleichzeitig von einem bestimmten
Beobachtungspunkt auf der Erde aus sichtbar waren und an einigen wenigen Stunden
überhaupt keiner. Die Erfahrungen dieses Experimentes hat man nun in den Block 2
eingebracht.
Inzwischen (Anfang 1994) funktionieren von den Satelliten des Block 1
nur noch die mit der Startnummer B1-9, B1-10 und B1-11. Den zu diesem Zeitpunkt aktuellen
Stand zeigt Tab. 6.2.
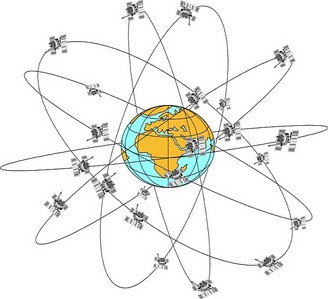
Diese 24 Satelliten sollten nun endgültig auf sechs orbitalen Kreisbahnen positioniert
werden, so dass dann auf jeder dieser Bahnen vier davon angeordnet sein werden. Ihre
Kreisbahnen sind zueinander um 60 Grad geneigt und bilden einen Winkel von 55 Grad zum
Äquator.
| Tabelle 6.2 Die
NAVSTAR-Satelliten von Block 2, Stand Anfang 1994 | |||
| Startnummer | Code | Startdatum | Status |
| B2-1 | 14 | 14.02.1989 | defekt |
| B2-2 | 2 | 10.06.1989 | defekt |
| B2-3 | 16 | 18.08.1989 | funktioniert |
| B2-4 | 19 | 21.10.1989 | funktioniert |
| B2-5 | 17 | 11.12.1989 | defekt |
| B2-6 | 18 | 20.01.1990 | funktioniert |
| B2-7 | 20 | 26.03.1990 | beim Start zerstört |
| B2-8 | 21 | 02.08.1990 | funktioniert |
| B2-9 | 15 | 01.10.1990 | funktioniert |
| B2-10 | 23 | 26.11.1990 | funktioniert |
| B2-11 | 24 | 04.07.1991 | funktioniert |
| B2-12 | 25 | 23.02.1992 | funktioniert |
| B2-13 | 28 | 10.04.1992 | funktioniert |
| B2-14 | 26 | 07.07.1992 | funktioniert |
| B2-15 | 27 | 09.09.1992 | funktioniert |
| B2-16 | 1 | 22.11.1992 | funktioniert |
| B2-17 | 29 | 18.12.1992 | funktioniert |
| B2-18 | 22 | 03.02.1993 | funktioniert |
| B2-19 | 31 | 30.03.1993 | funktioniert |
| B2-20 | 7 | 13.05.1993 | funktioniert |
| B2-21 | 9 | 26.06.1993 | funktioniert |
| B2-22 | 5 | 30.08.1993 | funktioniert |
Block3
Im Zuge von Block 3 sollen dann die "verbrauchten"
Satelliten, deren Lebensdauer mit 7,5 Jahren konzipiert wurde, durch neue ersetzt werden,
um die Gesamtanzahl weitestgehend konstant zu halten.
Nachdem nun also Anfang des Jahres
1994 einschließlich der älteren Generation 25 NAVSTAR-GPS-Satelliten verfügbar waren,
war zu diesem Zeitpunkt bereits eine lückenlose Versorgung zur zwei- und
dreidimensionalen Ortsbestimmung vorhanden.
Die offizielle Inbetriebnahme des NAVSTAR-Systems durch das Verteidigungsministerium
der Vereinigten Staaten erwartet man 1995. Nach meinen letzten Informationen hat die
Regierung der Vereinigten Staaten von diesem Zeitpunkt an eine für den zivilen Anwender
kostenlose Nutzung und Verfügbarkeit von zehn Jahren garantiert. Dies wird der Industrie,
und zwar vorwiegend der amerikanischen, ein Milliardengeschäft ermöglichen, da sich die
Anwendungsmöglichkeiten des GPS-Systems bei weitem nicht nur auf die Luft- oder Seefahrt
beschränkt.
Das GLONASS - GPS-Konzept
GLONASS nennt sich das russische Äquivalent zu GPS. GLONASS-Satelliten
sind in nur drei Raumebenen angeordnet. Mit einer Höhe von 19100 km laufen sie etwas
niedriger um die Erde als ihre NAVSTAR-Konkurrenten. Ihre Umlaufzeit beträgt daher nur 11
Stunden und 15 Minuten. Sowohl die Umlaufbahnen von NAVSTAR als auch die von GLONASS sind
nahezu kreisförmig. Im Gegensatz zu NAVSTAR sind einige der bisher gestarteten
GLONASS-Satelliten rein passiv. Sie haben noch nie aktiv gesendet und werden als optische
Reflektoren nur zum Vermessen der Umlaufbahnen benützt.
Als Frequenznormale werden bei GLONASS, ebenso wie bei NAVSTAR, eine
Cäsium-Atomuhr sowie als Ersatz zwei Rubidium-Systeme eingesetzt. Bei beiden Systemen
werden die Ausgangssignale dieser Präzisionszeitgeber zur phasensynchronen Steuerung der
Frequenzsynthesizer und aller benötigten Frequenzen und Steuersignale des Satelliten
verwendet.
DerTab. 6.3 können Sie die Frequenzen der GLONASS-Satelliten
entnehmen. Im Gegensatz zu NAVSTAR, die alle auf den beiden gleichen Trägern mit
1575,420 MHz (L1) und 1227,600 MHZ (L2) senden, hat jeder
GLONASS-Satellit sein individuelles Sendefrequenzpaar.
Auch GLONASS wurde ursprünglich für militärische Anwendungen
konzipiert. Entsprechend groß war die Geheimhaltung und der Zugang zu den, wenn auch
bisher spärlichen, Informationen bis zum Ende des "Kalten Krieges"
eingeschränkt. Doch auch hier gibt es inzwischen wesentlich mehr zivile als militärische
Anwender.
Die ersten GLONASS-Empfangsgeräte sowie kombinierte NAVSTAR/GLONASS-Empfänger werden
bald auf dem Markt seint.
Tab. 6.3 Frequenzen der GLONASS-Navigationssatelliten | ||
| Kanal | L1 | L2 |
| GLONASS 0 | 1602,0000 MHz | 1246,0000 MHz |
| GLONASS 1 | 1602,5625 MHz | 1246,4375 MHz |
| GLONASS 2 | 1603,1250 MHz | 1246,0000 MHz |
| GLONASS 3 | 1603,6785 MHz | 1247,0000 MHz |
| GLONASS 4 | 1604,2500 MHz | 1247,0000 MHz |
| GLONASS 5 | 1604,8125 MHz | 1248,0000 MHz |
| GLONASS 6 | 1605,3750 MHz | 1248,0000 MHz |
| GLONASS 7 | 1605,9375 MHz | 1249,0000 MHz |
| GLONASS 8 | 1606,5000 MHz | 1249,0000 MHz |
| GLONASS 9 | 1607,0625 MHz | 1249,0000 MHz |
| GLONASS 10 | 1607,6250 MHz | 1250,3750 MHz |
| GLONASS 11 | 1608,1875 MHz | 1250,8125 MHz |
| GLONASS 12 | 1608,7500 MHz | 1251,2500 MHz |
| GLONASS 13 | 1609,3125 MHz | 1251,6875 MHz |
| GLONASS 14 | 1609,8750 MHz | 1252,1250 MHz |
| GLONASS 15 | 1610,4375 MHz | 1252,5625 MHz |
| GLONASS 16 | 1611,0000 MHz | 1253,0000 MHz |
| GLONASS 17 | 1611,5625 MHz | 1253,4375 MHz |
| GLONASS 18 | 1612,1250 MHz | 1253,8750 MHz |
| GLONASS 19 | 1612,6785 MHz | 1254,3125 MHz |
| GLONASS 21 | 1613,2500 MHz | 1254,7500 MHz |
| GLONASS 21 | 1613,8125 MHz | 1255,1875 MHz |
| GLONASS 22 | 1614,3750 MHz | 1255,6250 MHz |
| GLONASS 23 | 1614,9375 MHz | 1256,0625MHz |
| GLONASS 24 | 1615,5000 MHz | 1256,5000 MHz |
NAVSTAR und GLONASS sind die Vorstufen zu einem zivilen Navigationssystem. Noch haben die Verteidigungsmächte die Hand darauf, und angesichts der hohen Kosten scheint ein rein ziviles System zu kostspielig zu sein.
Umfangreiche Studien haben jedoch gezeigt, dass es auf Dauer weitaus billiger ist, selbst 28 und mehr Satelliten zu bauen, in den Orbit zu befördern und dort zu warten, als nur alleine alle Streckenfunkfeuer für die Luftfahrt zu unterhalten.
Die NAVSTAR GPS-Satelliten
Jeder NAVSTAR - GPS-Satellit besteht aus über 65000 Einzelteilen und hat eine Masse von fast einer Tonne. Zwei mit Solarzellen bestückte Sonnenpaddel mit einer Gesamtfläche von 7,25 Quadratmetern sind so ausgelegt, dass sie noch am Ende der geplanten Lebensdauer die Systeme an Bord des Satelliten mit 700 Watt elektrischer Energie versorgen können. Damit werden die Sender, die Atomuhren, die Drallräder zur Lagestabilisierung sowie alle übrigen elektrischen Systeme am Leben erhalten und die Batterien aufgeladen. Diese Speicherbatterien sind in ihrer Größe so bemessen, dass sie eine sichere Energieversorgung garantieren, wenn der Satellit sich im Erdschatten befindet und somit die Sonnenzellen keinen Strom liefern können. Dies ist bei einem Umlauf für etwa eine Stunde der Fall.
 Sieben thermostatisch geregelte Jalousienfenster und wärmeisolierendes Dämmaterial sorgen für eine gleichbleibende Temperatur der empfindlichen Bauelemente. Die Innentemperatur beträgt ca. 20 Grad Celsius. Da die Computerteile und die Atomuhren primär für die Verwendung bei Raumtemperaturen auf der Erde entwickelt wurden, musste man hier eine dementsprechende Umgebung schaffen.
Sieben thermostatisch geregelte Jalousienfenster und wärmeisolierendes Dämmaterial sorgen für eine gleichbleibende Temperatur der empfindlichen Bauelemente. Die Innentemperatur beträgt ca. 20 Grad Celsius. Da die Computerteile und die Atomuhren primär für die Verwendung bei Raumtemperaturen auf der Erde entwickelt wurden, musste man hier eine dementsprechende Umgebung schaffen.Die der Erde zugedrehte Seite des Satelliten enthält eine Plattform mit 12 Helical-Wendelantennen. Diese strahlen zwei verschieden modulierte, kontinuierliche Signale mit den Frequenzen 1575,42 MHz (Träger-Frequenz L1) und 1227,60 MHz (Trägerfrequenz L2) ab.
Analog zu den VOR-Systemen oder der DECCA-Navigation handelt es sich bei der Satellitennavigation um ein passives Navigationsverfahren, da die Signale (für den Anwender) nur vom Satellit zu den Empfängern gerichtet sind. Diese Signale werden nach einem genau festgelegten "Fahrplan" abgestrahlt. Wie diese Signale aussehen und welche Informationen sie übertragen, erfahren Sie weiter hinten in diesem Buch.
Jeder NAVSTAR - GPS-Satellit umkreist einmal die Erde in 11 Stunden und 58 Minuten bei einem Bahnradius von 20.200km (also genau zweimal pro Sternentag). Er überfliegt demnach an jedem Tag denselben Breitenkreis auf der gleichen Seite der Erde um genau 4 Minuten früher als am vorherigen und ist dabei gleichzeitig um 1 Grad weiter nach Osten versetzt.
An dieser Stelle könnten zwei Fragen auftauchen: Warum sind Navigationssatelliten nicht stationär (wie z.B. TV- oder Fernmeldesatelliten) und, da dies nicht der Fall ist, warum beträgt (bisher) die Umlaufzeit bei den NAVSTAR - GPS-Satelliten nicht exakt 12 Stunden, sondern 2 Minuten weniger?
Die erste Frage lässt sich leicht beantworten. Es gibt nur eine Umlaufbahn, auf der sich ein so genannter geostationärer (erdfester) Satellit befinden kann, nämlich genau über dem Äquator. Auf dieser Bahnebene sind alle geostationären Fernsehsatelliten (Kopernikus, Eutelsat, Astra usw.), die geostationären Wettersatelliten, militärische Aufklärungs- und Nachrichtensatelliten, Telekommunikationssatelliten für Rundfunk-, Fernseh- und Telefonübertragungen usw., wie auf einer Perlenkette aufgereiht, platziert. Für eine flächendeckende Navigation ist jedoch eine möglichst gleichmäßige Verteilung der Navigationssatelliten über die Himmelsschale nötig. Je gleichmäßiger diese Anordnung ist, umso leichter und genauer ist die Ermittlung der eigenen Position und umso sicherer ist der gleichzeitige Empfang ausreichender Signale zu jeder Tages- und Nachtzeit an jedem Ort auf der Erde.
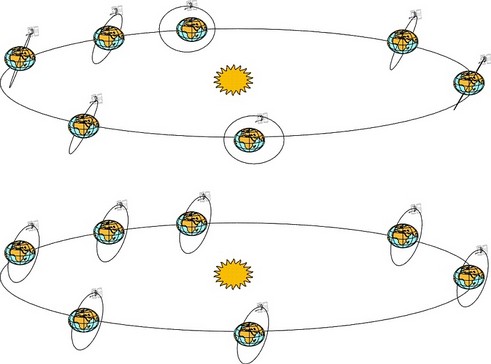 Um die zweite Frage beantworten zu können, muss man berücksichtigen, dass nicht nur die Satelliten um die Erde kreisen, sondern die Erde auch einer Bahn um die Sonne folgt, und zwar, gemessen an der Umlaufbahn um die Sonne, um 1 Grad pro Tag. Bei einer Erdumdrehungszeit von genau 12 Stunden würde sich die Bahnebene des entsprechenden Satelliten mit der Erde um die Sonne drehen. Verkürzt man nun die Umlaufzeit um zwei Minuten (4 Minuten pro Tag), bleibt die Bahnebene unabhängig von der Lage der Erde bezüglich der Sonne im Raum stehen, da vier Minuten multipliziert mit 360 Tagen (oder 360 Grad) genau einen Tag ergibt.
Um die zweite Frage beantworten zu können, muss man berücksichtigen, dass nicht nur die Satelliten um die Erde kreisen, sondern die Erde auch einer Bahn um die Sonne folgt, und zwar, gemessen an der Umlaufbahn um die Sonne, um 1 Grad pro Tag. Bei einer Erdumdrehungszeit von genau 12 Stunden würde sich die Bahnebene des entsprechenden Satelliten mit der Erde um die Sonne drehen. Verkürzt man nun die Umlaufzeit um zwei Minuten (4 Minuten pro Tag), bleibt die Bahnebene unabhängig von der Lage der Erde bezüglich der Sonne im Raum stehen, da vier Minuten multipliziert mit 360 Tagen (oder 360 Grad) genau einen Tag ergibt.Die Abb. 6.3 zeigt einmal eine Bahnebene bei einer Umlaufzeit von 12 Stunden und einmal bei 11 Stunden und 58 Minuten. Durch diese Maßnahme erreicht man, dass die Lage des GPS-Koordinatensystems im Weltraum unabhängig von der Erdposition und damit von der Jahreszeit ist. Ob diese Überlegung sinnvoll war, wird allerdings zur Zeit bezweifelt. Neueren Informationen zufolge soll die Umlaufzeit künftig auf 12 Stunden verlängert werden, um Resonanzen mit der Schwerkraft der Erde zu vermeiden. Dies wäre jedoch für uns als Anwender unbedeutend, da die entsprechende Korrektur vom System selbst vorgenommen würde.
Die GPS Kontrollstationen
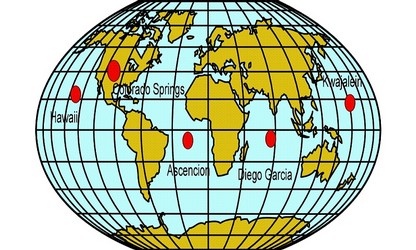 Verteilt über die Erde befinden sich fünf Kontrollstationen, deren Positionen mit höchster Genauigkeit bekannt sind. Drei von ihnen (Ascension, Diego Garcia und Kwajalein) können mit den Satelliten bidirektionale Verbindungen herstellen und ihnen damit Korrekturdaten übermitteln. Die beiden anderen Stationen (Hawaii und Colorado Springs) sind reine Beobachterstationen, wobei die Station in Colorado Springs als Zentrale gewählt wurde. Die von allen Stationen empfangenen Satellitendaten werden an diese Zentrale übertragen. Hier wird entschieden, ob Korrekturen der Satellitenpositionen, der Atomuhren oder anderer Komponenten nötig sind oder gegebenenfalls sogar ein Reservesatellit in Betrieb genommen werden muss. Abb. 6.4 zeigt die geographische Lage dieser Stationen.
Verteilt über die Erde befinden sich fünf Kontrollstationen, deren Positionen mit höchster Genauigkeit bekannt sind. Drei von ihnen (Ascension, Diego Garcia und Kwajalein) können mit den Satelliten bidirektionale Verbindungen herstellen und ihnen damit Korrekturdaten übermitteln. Die beiden anderen Stationen (Hawaii und Colorado Springs) sind reine Beobachterstationen, wobei die Station in Colorado Springs als Zentrale gewählt wurde. Die von allen Stationen empfangenen Satellitendaten werden an diese Zentrale übertragen. Hier wird entschieden, ob Korrekturen der Satellitenpositionen, der Atomuhren oder anderer Komponenten nötig sind oder gegebenenfalls sogar ein Reservesatellit in Betrieb genommen werden muss. Abb. 6.4 zeigt die geographische Lage dieser Stationen.Mehrere internationale Netzwerke, die als eine Reihe von miteinander kommunizierenden Beobachterstationen zu verstehen sind, empfangen die GPS-Signale für die verschiedensten Zwecke. Eines der größten ist das Cooperative International GPS Network (CIGNET), welches vom National Geodetic Survey (NGS) der Vereinigten Staaten betrieben wird und auch in Deutschland einen Knoten in D-93444 Kötzting-Wettzell (im Allgäu) hat. Für eine Positionsbestimmung höchster Genauigkeit nach der Differentialmethode (mehr dazu später) sind solche vernetzten Empfangsstationen unverzichtbar.
Die GLONASS GPS-Satelliten
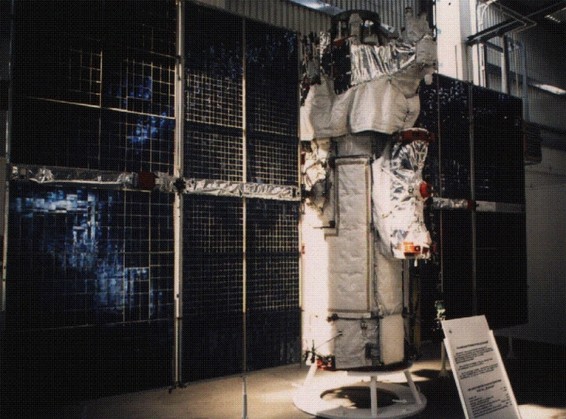 Informationen über GLONASS-Satelliten waren bisher sehr viel schwieriger zu erhalten. Seit der Öffnung des Ostens jedoch ist dies jetzt, wenn auch nur in begrenztem Umfang, möglich geworden.
Informationen über GLONASS-Satelliten waren bisher sehr viel schwieriger zu erhalten. Seit der Öffnung des Ostens jedoch ist dies jetzt, wenn auch nur in begrenztem Umfang, möglich geworden.So hatte ich das Glück, auf der Internationalen Ausstellung für Luft- und Raumfahrt 1994 am Flughafen Berlin-Schönefeld erstmals einen GLONASS-Satelliten in seiner ganzen Größe zu besichtigen (ein NAVSTAR-Satellit war zu meinem Bedauern leider nicht ausgestellt).
Jeder dieser GLONASS-Satelliten hat eine Masse von etwa 1300 kg. Mit ausgefahrenen Solarzellen misst er in der Breite 7,23 Meter und hat bei ausgefahrenem Magnetometergestänge eine gesamte Länge von 7,84 Metern. Da jeder Satellit auf einer eigenen Frequenz arbeitet, wurde dafür der Bereich von 1602,00 MHz bis 1615,50 MHz für die Trägerfrequenz L1 und 1246,00 MHz bis 1256,50 MHz für L2 reserviert. Die genauen Frequenzen der einzelnen Übertragungskanäle können Sie Tab. 6.3 weiter vorne in diesem Buch entnehmen.
Die Signale der GPS-Satelliten und ihr Informationsgehalt
Welche Signale werden nun von den GPS-Satelliten abgestrahlt?
Aufgabe war es, eine Modulationsmethode für die Trägerfrequenzen der Satelliten zu finden, welche drei Probleme löste: Eines davon ist die Genauigkeitsverringerung durch die Grundlinienverlängerung (ein Problem, das es auch bei den erdgebundenen Stationen gibt). Die Satellitenkonstellation, also die Entfernungen und Richtungen der einzelnen Satelliten zum Beobachtungsort, ändert sich ständig. Je ungleichmäßiger die Verteilung der Satelliten ist, desto schlechter ist die erreichbare Positionsgenauigkeit. Diese als GDOP(GeometricDilutionOfPrecision) genannte Eigenschaft wird als ein Qualitätsfaktor auf dem Display vieler Empfangsgeräte angezeigt und in die Berechnung für die relativen Genauigkeit, d.h. ohne die unschöne Eigenschaft der absichtlich vom DOD eingebrachten Genauigkeitsverschlechterung, mit einbezogen.
Das zweite Problem ist die notwendige Separierung der Daten bei den NAVSTAR-GPS-Satelliten, da diese alle auf derselben Frequenz gleichzeitig senden. Stellen Sie sich vor, sie empfangen auf der gleichen Frequenz Ihres Rundfunkgerätes mehrere Sender mit verschiedenen Programmen "gleichzeitig". Ihre Freude wäre sicher nicht sehr groß (GLONASS geht hier einen anderen Weg).
Und schließlich besteht noch das Problem der Mehrdeutigkeit. Bei einer Frequenz von etwa 1,5 Gigahertz beträgt die Wellenlänge 20 cm. Auch hier musste eine Lösung gefunden werden.
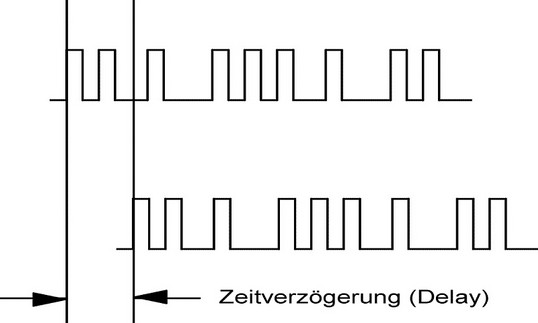
Ein Modulationsverfahren, das alle drei Probleme gleichzeitig löst, besitzt die interessante Bezeichnung Spread-Spectrum-Modulation. Darunter versteht man ein phasenmoduliertes Bandspreizverfahren, bei dem die Zeitinformation in der Modulation selbst versteckt ist.
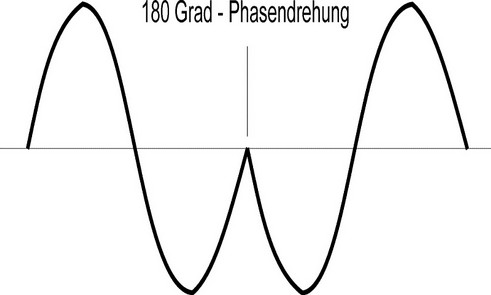
Mit einem Pseudo-Zufalls-Signal von 1023 Bit wird die Trägerwelle in ihrer Phase moduliert (bei jeder Änderung eines Datenbits findet eine Invertierung des Signals statt). Pseudo deshalb, weil dieses Zufallssignal zwar einer zufälligen Folge von unterschiedlichen binären Zuständen entspricht, jedoch bei gleichen Startbedingungen reproduzierbar ist. Da beide Signale (Träger und Pseudo-Zufalls-Signal) von demselben Hauptoszillator abgeleitet werden, sind sie starr miteinander verkoppelt. Dadurch wird erreicht, dass eine Invertierung der Trägerwelle immer im Signalnulldurchgang erfolgt. Die Frequenz des Pseudocodes beträgt für die zivile Navigationsanwendung 1023 Kilohertz (1 023 000 Bits pro Sekunde) und wiederholt sich dadurch 1000 mal pro Sekunde (1 023 000 / 1023). Die Wiederholfrequenz des Pseudocodes liegt bei 1 ms und die Mehrdeutigkeit damit bei 300 km. Unter Einbeziehung der sonstigen übertragenen Satellitendaten lässt sich dieser Wert um weitere Größenordnungen erhöhen. Damit wäre das Problem der Mehrdeutigkeit weitgehend gelöst.
 Durch die Phasenmodulation mit einem Pseudo-Zufallscode verteilt sich die Sendeenergie auf plus/minus 1023 Kilohertz, d.h. auf eine Bandbreite von ca. 2 MHz. Wegen der großen Entfernungen zu den Satelliten und deren dazu relativ geringen Sendeleistungen fällt die Feldstärke am Empfangsgerät weit unter dessen Eingangsrauschen. Eine Signal-Rückgewinnung ist deshalb nur durch ein Verfahren möglich, das sich Korrelation nennt. Darauf werde ich nachher noch zu sprechen kommen. Zunächst soll es uns genügen, zu wissen, dass sich damit das Problem der Datenseparierung bei gleichen Trägerfrequenzen lösen lässt. Durch die unterschiedlichen Pseudo-Zufallscodes der einzelnen Satelliten kann man jeden von ihnen auf der Empfangsseite wie mit einem Sieb nachrichtentechnisch gezielt herausfiltern.
Durch die Phasenmodulation mit einem Pseudo-Zufallscode verteilt sich die Sendeenergie auf plus/minus 1023 Kilohertz, d.h. auf eine Bandbreite von ca. 2 MHz. Wegen der großen Entfernungen zu den Satelliten und deren dazu relativ geringen Sendeleistungen fällt die Feldstärke am Empfangsgerät weit unter dessen Eingangsrauschen. Eine Signal-Rückgewinnung ist deshalb nur durch ein Verfahren möglich, das sich Korrelation nennt. Darauf werde ich nachher noch zu sprechen kommen. Zunächst soll es uns genügen, zu wissen, dass sich damit das Problem der Datenseparierung bei gleichen Trägerfrequenzen lösen lässt. Durch die unterschiedlichen Pseudo-Zufallscodes der einzelnen Satelliten kann man jeden von ihnen auf der Empfangsseite wie mit einem Sieb nachrichtentechnisch gezielt herausfiltern.Beim GLONASS-System wird auch der Pseudozufallscode für die Separierung angewandt. Allerdings erzeugen hier die einzelnen Satelliten immer denselben Code. Eine Identifizierung wird dadurch möglich, dass man jeden GLONASS-Satelliten im Gegensatz zu den GPS-Satelliten auf einer anderen Frequenz senden lässt.
An dieser Stelle könnten Sie nun fragen, warum die Navigationssatelliten eigentlich kein "normales" Signal wie bei einer Rundfunk- oder Fernsehsendung senden.
Es gibt sehr viele technische Gründe, die zur Phasenmodulation mit Pseudozufallscodes führten. Außer der Lösung der bisher besprochenen Probleme war die Ökonomie des Systems ein weiterer wichtiger Aspekt. TV-Sender z.B. benötigen wegen ihrer sehr großen Bandbreite sehr hohe Sendeleistungen. Zum Empfang dieser Nachrichten auf der Erde sind aufwendige, richtungsempfindliche Parabolempfangsantennen nötig, um ein auswertbares Signal zu erhalten. Beim GPS wäre eine Empfangsantenne dieser Art unpraktikabel. Hier war das Ziel, mit einer einfach zu handhabenden, weitgehend richtungsunabhängigen Empfangsantenne auszukommen.
Um dadurch die Sendeleistung der Satelliten nicht ins Astronomische hochtreiben zu müssen, blieb nur der jetzt gewählte Weg. Unter Ausnutzung aller Tricks der informations- und nachrichtentechnischen Theorien und technischen Möglichkeiten, genügen relativ kleine Sendeleistungen auf Seite der Satelliten und nur wenige Zentimeter große Empfangsantennen.
Wie kann man nun solch ein Pseudo-Zufallssignal erzeugen?
Es gibt in der Welt der Elektronik mehrere Methoden, einen Pseudo-Zufallscode zu erzeugen. Eine einfache, sichere und deshalb sehr beliebte Methode, die mit relativ wenigen elektronischen Bauelementen realisierbar ist, verwendet rückgekoppelte Schieberegister. Dies sind elektronische integrierte Schaltungen, wie sie in CCD-Kameras, Datenanpassungsgliedern und Signalverzögerungsgeräten zu finden sind.
Dieses Prinzip der rückgekoppelten Schieberegister wird bei beiden GPS-Systemen verwendet. Es würde zu weit führen, die Theorie dafür hier in allen Einzelheiten zu behandeln. Es soll uns genügen zu wissen, dass für die Erzeugung eines Pseudo-Zufallcodes sich das zufallähnliche Bitmuster in bestimmten zeitlichen Abständen exakt wiederholen und das im Empfänger für die Korrelation erzeugte Referenzmuster sich dazu analog verhalten muss. Die Startbedingungen und die dafür erforderliche elektronische Schaltung muss demnach auf der Sender- und auf der Empfängerseite zumindest logisch dieselbe sein.
Durch die Wahl verschiedener Rückkopplungszweige variieren die Zufallsmuster, so dass jedem NAVSTAR-GPS-Satelliten ein ganz bestimmtes und eindeutiges zugeordnet werden kann. Für jeden Satelliten wird diese Bedingung einmal festgelegt. Dieser als PRN-Code bezeichnete Pseudo-Zufallscode (PRN=PseudoRandomNoise) stellt quasi die Adresse jedes GPS-Satelliten dar und dient seiner Identifizierung.
 Die Identifizierung der GLONASS-Satelliten dagegen geschieht über die verschiedenen Sendefrequenzen bei gleichbleibendem PRN-Code. Die Anwendung des PRN-Codes dient hier primär der Möglichkeit, eine Rauschbefreiung durch die bereits erwähnte Korrelation vorzunehmen, da man es mit Sendeleistungen und Ausbreitungsbedingungen vergleichbar dem NAVSTAR-System zu tun hat.
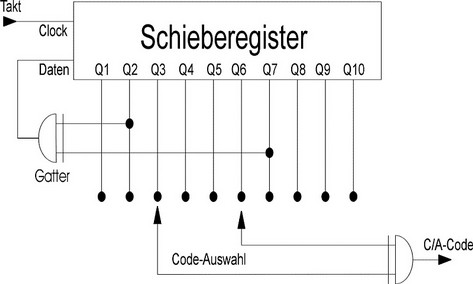
Die Identifizierung der GLONASS-Satelliten dagegen geschieht über die verschiedenen Sendefrequenzen bei gleichbleibendem PRN-Code. Die Anwendung des PRN-Codes dient hier primär der Möglichkeit, eine Rauschbefreiung durch die bereits erwähnte Korrelation vorzunehmen, da man es mit Sendeleistungen und Ausbreitungsbedingungen vergleichbar dem NAVSTAR-System zu tun hat.Abb. 6.7 zeigt die Blockschaltung einer einfachen elektronischen Anordnung mit digitalen Schaltkreisen zur Erzeugung eines Pseudo-Zufallscodes.
Das hier gezeigte Schieberegister besteht aus zehn Speicherzellen. Die am Dateneingang anliegende Information (logisch "0" oder "1") wird durch jeden Impuls am Takteingang um eine Zelle weiter geschoben. Gleichzeitig wird dabei jede bereits gespeicherte Information nach rechts in die Nachbarzelle übertragen. Wann eine Wiederholung des Datenstrommusters eintritt, entscheidet die Komplexität der Rückkopplung, die hier der Einfachheit halber nur durch ein einzelnes Gatter angedeutet wird. Durch entsprechende Auswahl (Anzapfung) von zwei oder mehreren Speicherzellen wird der satellitenspezifische PRN-Code erzeugt.
Der Pseudo-Zufallscode, der für uns als zivile Anwender interessant ist, wird C/A-Code genannt (C/Asteht fürCoarseAcquisition. Oftmals wird das "C" als Indiz für Civil benützt. Lässt sich auch besser merken!). Er entspricht der zuvor genannten Art bezüglich Datenrate und Datenwiederholung.
Im Gegensatz dazu gibt es für die militärischen Anwendungen den P-Code (P=Precise). Die Frequenz dieses Codes ist zehnmal so hoch wie die des C/A-Codes und die Codewiederholung beträgt 267 Tage, anstatt einer Millisekunde! Dieser Code kann vom Verteidigungsministerium durch einen so genannten Y-Code ersetzt werden, welcher dann verschlüsselt wird. Da dies in der Regel unangekündigt erfolgt und ein Zugriff auf den P-Code dann nicht mehr möglich ist, bleiben diese beiden Codes der Auswertung von Stellen des Verteidigungsministeriums der Vereinigten Staaten vorbehalten.
Hier wäre noch zu erwähnen, dass die L1 - Frequenz mit beiden Codes (C/A und P) und die L2 - Frequenz nur mit dem P- oder dem Y-Code moduliert ist. Schon wieder eine interessante Frage: Warum sendet ein GPS-Satellit (NAVSTAR und GLONASS) auf zwei verschiedenen Frequenzen?
Eine zweite Frequenz wurde hauptsächlich deshalb eingeführt, weil die Geschwindigkeit der elektromagnetischen Wellen nur im Vakuum genau der Lichtgeschwindigkeit entspricht. Da diese sich jedoch beim Eintritt in die Erdatmosphäre frequenzabhängig geringfügig verlangsamt, kann bei gleichzeitigem Empfang beider Frequenzen eben durch diese Frequenzabhängigkeit von dem entsprechenden Empfangsgerät dieser Effekt gemessen und damit kompensiert werden. Die damit verbundene Genauigkeitserhöhung steht jedoch in keinem Verhältnis zu den Kosten für die erforderlichen Empfänger und bleibt daher den militärischen Anwendungen vorbehalten. Ständige entwicklungstechnische Fortschritte sorgen jedoch auch auf dem zivilen Sektor für Überraschungen, so dass eine erreichbare Positionsgenauigkeit von bis zu 20 Metern in allen drei Dimensionen mit Geräten, die nur den C/A-Code auswerten können, nicht unüblich ist.
Für die preiswerten GPS-Navigationsgeräte wurde eine entsprechende Messung für die Signallaufzeitkorrektur an einem "Normaltag" durchgeführt. So hat man eine Konstante ermittelt, die bei den Berechnungen der Positionsdaten mit berücksichtigt wird.
Doch damit noch nicht genug!
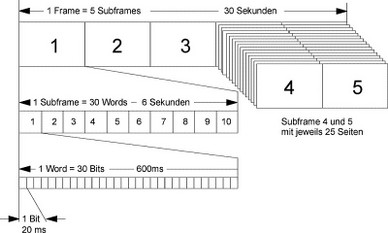 Ein GPS-Empfänger benötigt noch mehr Informationen von den Satelliten, damit er die an ihn gestellten Aufgaben erfüllen kann. Diese werden als "GPS-Messages" bezeichnet. Sie bestehen aus zwei Teilen, von denen der eine (Ephemerides) die Daten des gerade empfangenen Satelliten und der andere (Almanach) die Daten des gesamten Systems enthält. Verpackt sind sie in einem Datenübertragungspaket, welches in der Fachsprache als "Frame" (engl. = Rahmen, Kasten, Gehäuse) bezeichnet wird. Jedes dieser Frames besteht aus weiteren fünf Subframes, wovon zwei aus wiederum je fünfundzwanzig Seiten bestehen. Dieses Gesamtdatenpaket wird 25 Mal übertragen. Die Subframes 1, 2 und 3 enthalten dabei innerhalb eines Masterframes immer dieselben Daten, die Subframes 4 und 5 jedes Mal andere. Damit beträgt die Gesamtübertragungsdauer eines kompletten "Master-Frames" bei der relativ langsamen Informationsrate von 50 Bit pro Sekunde 12,5 Minuten (1 Bit ist die kleinste Informationseinheit und wird durch einen von zwei verschiedenen Zustände gekennzeichnet, also "hoch" oder "tief", "ein" oder "aus", "ja" oder "nein"). Abb. 6.8 zeigt dies noch einmal anschaulich.
Ein GPS-Empfänger benötigt noch mehr Informationen von den Satelliten, damit er die an ihn gestellten Aufgaben erfüllen kann. Diese werden als "GPS-Messages" bezeichnet. Sie bestehen aus zwei Teilen, von denen der eine (Ephemerides) die Daten des gerade empfangenen Satelliten und der andere (Almanach) die Daten des gesamten Systems enthält. Verpackt sind sie in einem Datenübertragungspaket, welches in der Fachsprache als "Frame" (engl. = Rahmen, Kasten, Gehäuse) bezeichnet wird. Jedes dieser Frames besteht aus weiteren fünf Subframes, wovon zwei aus wiederum je fünfundzwanzig Seiten bestehen. Dieses Gesamtdatenpaket wird 25 Mal übertragen. Die Subframes 1, 2 und 3 enthalten dabei innerhalb eines Masterframes immer dieselben Daten, die Subframes 4 und 5 jedes Mal andere. Damit beträgt die Gesamtübertragungsdauer eines kompletten "Master-Frames" bei der relativ langsamen Informationsrate von 50 Bit pro Sekunde 12,5 Minuten (1 Bit ist die kleinste Informationseinheit und wird durch einen von zwei verschiedenen Zustände gekennzeichnet, also "hoch" oder "tief", "ein" oder "aus", "ja" oder "nein"). Abb. 6.8 zeigt dies noch einmal anschaulich.Die einzelnen Subframes der GPS-Signale enthalten u. a. folgende Daten:
Subframe 1 enthält die Daten der Satellitenuhren, das Datum bzw. das Alter der Daten und einige Steuermarken (sog. Flags).
Subframe 2 und 3 enthalten die Bahndaten des entsprechenden Satelliten, die "Orbit-Parameter".
Subframe 4, der aus 25 verschiedenen Seiten besteht, enthält den Almanach für die Satelliten mit den Nummern 25 - 32, Daten über die Ionosphäre, UTC-Daten (UTC=UniversalTimeCoordinated, die frühere Bezeichnung lautete Greenwich-Mean-Time = GMT), Daten über die Konfiguration aller Satelliten, Daten über den funktionellen Status aller Satelliten und für jeden Satelliten ein sogen. "Antispoof-Flag" (spoof = Schwindel, Trick) zum Anzeigen der P-Codeverschlüsselung.
Subframe 5 schließlich enthält den Almanach und den funktionellen Status für die Satelliten 1 - 24.
An dieser Stelle verlassen wir nun den Himmel und begeben uns an den Ort, an dem wir eine Positionsmessung durchführen wollen. Was geschieht nun mit den vielen Informationen, die uns die Navigationssatelliten zur Verfügung stellen?
Beginnen wir an der Stelle, an der die Signale aus dem Weltraum auch tatsächlich eintreffen, an der Antenne.
Wie wir alle wissen, ist ohne eine wirkungsvolle Antenne weder Rundfunk- noch Fernsehempfang möglich. Bei einem GPS-Navigationsemp-fänger verhält sich dies nicht anders.
An die Antenne und den darauf folgenden Empfänger eines GPS-Navigators werden sehr hohe Anforderungen gestellt, da das ankommende Signal aus dem Weltraum, u. a. bedingt durch die geringe Sendeleistung jedes Satelliten von nur 20 Watt, in der Größe von 0,000 000 07 Volt (70 Nanovolt!) liegt. Dies ist etwa fünfzig Mal weniger als das, was ein guter Funkempfänger im UKW-Bereich benötigt, um nur etwas eines Signals erahnen zu können.
Die Antenne eines GPS-Navigators muss eine halbkugelförmige Charakteristik aufweisen. Dadurch kann sie einerseits alle Satelliten am Himmel gleich gut empfangen und andererseits die von der Erde, vom Wasser und sonstigen reflektiven Gegenständen unerwünschten Signale gut unterdrücken. Durch diese Bauart ist ein zusätzlicher Antennengewinn allerdings nicht mehr zu erwarten, wie dies bei Richtempfangsantennen für die üblichen Empfänger erdgebundener Stationen heute üblich ist. Inzwischen wurden jedoch anspruchsvolle und ausgereifte elektronische Schaltungen und Verfahren entwickelt, die einen zuverlässigen Empfang ermöglichen. Mehr dazu erfahren Sie im Kapitel GPS-Empfänger und Gerätetechnik. Hier möchte ich mich zunächst auf die Auswertung der Signale beschränken.
Mit den Daten des Almanach kann der Empfänger feststellen, welche Satelliten am Himmel sichtbar sind. Diese können dann gezielt erfasst und ihre Ephemeriden eingelesen werden. Die empfängereigene batteriegepufferte Datenbank wird dabei immer wieder auf den neuesten Informationsstand gebracht. Deshalb ist das "Einloggen", also die Zeit zwischen dem Einschalten des GPS-Empfängers und der ersten nutzbaren Positionsbestimmung unter anderem davon abhängig, wie lange dieser nicht mehr benutzt wurde bzw. wieweit er in ausgeschaltetem bzw. nicht empfangsbereitem Zustand von seiner letzten geloggten Position entfernt wurde.
Bevor jedoch irgendwelche Daten zur Weiterverarbeitung zur Verfügung stehen, müssen diese erst einmal aus dem verrauschten und gestörten Empfangssignal herausgefiltert werden. Wie wir bereits wissen, ist der PRN-Code, mit dem das Satellitensignal moduliert ist, für jeden einzelnen Satelliten bekannt. Daher können wir eine Methode der Signalverarbeitung anwenden, die schon lange bekannt ist und eine Rauschbefreiung des sehr schwachen Signales ermöglicht. Diese Methode nennt sich Korrelation.
Die Korrelation versteht man als ein Maß für die Ähnlichkeit zweier Signale. Im Gegensatz zur Kreuzkorrelation, bei der zwei verschiedene Signale durch Multiplikation verglichen werden, sprechen wir beim Vergleich von zwei gleichen Signalen von der Autokorrelation.
Die Identifizierung eines bestimmten Satelliten läuft, einfach gesagt, folgendermaßen ab: Eine elektronische Schaltung im GPS-Empfänger (rückgekoppeltes Schieberegister, aha!) erzeugt einen PRN-Code, der in seiner Folge dem des gesuchten Satelliten aufmodulierten entspricht.
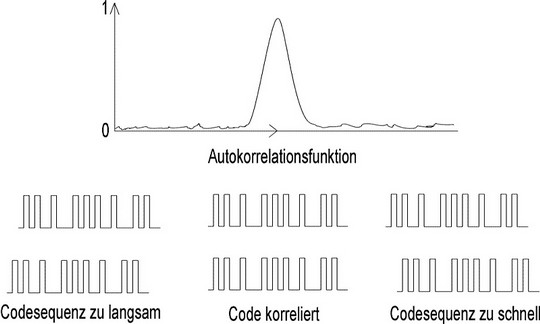
Dieser Code wird nun laufend mit den von den Satelliten empfangenen Codes Bit für Bit multipliziert, was hier einem Bitmustervergleich entspricht. Lässt man nun diesen im Empfänger erzeugten Code ein klein wenig schneller oder langsamer laufen (zeitlich gesehen), wird beim Passieren des "Synchronisationspunktes" ein Maximum des Multiplikationsproduktes erreicht. Bildlich kann man sich das so vorstellen, dass der vom Empfänger erzeugte PRN-Code an dem vom Satelliten empfangenen so lange vorbei geschoben wird, bis beide deckungsgleich sind.
Da durch die Multiplikation sowohl bei zwei positiven Bits als auch bei zwei negativen, jeweils ein positives Produkt entsteht, erhält die Autokorrelationsfunktion genau hier ihr Maximum. Dieses Signal ist, trotz dem hohen, dem Nutzsignal überlagerten statistischen Rauschen, sehr ausgeprägt. Bei fortschreitender Multiplikation der Signale geht die Autokorrelation für das statistische Rauschen gegen Null, während die des periodischen und identischen Nutzsignales ein Maximum annimmt. Auf diese Weise lässt sich ein periodisches Signal aus dem stark verrauschten Empfangssignal herausheben.
 Sobald der Satellit identifiziert ist, muss die Elektronik mittels einer Nachregelung (Code-Tracker) diesen Zustand aufrechterhalten. Dann können die Daten des Satelliten (Almanach und Ephemerides) eingelesen werden.
Sobald der Satellit identifiziert ist, muss die Elektronik mittels einer Nachregelung (Code-Tracker) diesen Zustand aufrechterhalten. Dann können die Daten des Satelliten (Almanach und Ephemerides) eingelesen werden.Wie bereits weiter oben erwähnt, werden die Daten mit einer Datenrate von "nur" 50 Zeichen pro Sekunde übertragen. Deshalb können diese nach dem Einloggen mit einem sehr schmalen Filter vom Rauschen befreit werden. Mitübertragene Korrektur- und Prüfbits sorgen für eine fehlerfreie Datenauswertung.
Aus den so empfangenen Satellitendaten erhalten wir die Positionen der Satelliten zu einem bestimmten Zeitpunkt. Um nun die eigene Position zu berechnen, muss die Entfernung zwischen den Satellitenpositionen und dem Empfangsort gemessen werden. Dies geschieht über die Laufzeitmessung der Satellitensignale.
Sorgt man dafür, dass der im Empfänger generierte PRN-Code exakt zur selben Zeit erzeugt wird, wie der des gesuchten Satelliten, und verzögert man diesen so lange, bis die Autokorrelation ihr Maximum erreicht, so entspricht diese Verzögerungszeit genau der Laufzeit des Satellitensignales. Soweit das Prinzip. Da die Uhr im Empfänger jedoch niemals so genau sein kann, wie es erforderlich sein müsste, wendet man einen mathematischen Trick an, auf den ich gleich zu sprechen komme. Doch zunächst noch etwas über die Zeitmaschinen in den Satelliten selbst.
Atomuhren an Bord
Die Positionsermittlung beruht auf einer Entfernungsmessung zwischen Satellit und Auswertegerät. Deshalb hängt die Positionsgenauigkeit wesentlich davon ab, wie exakt unser Empfangsgerät die Laufzeiten der Signale von den Satelliten zum Beobachtungsort messen kann.
Man nehme also (theoretisch) ein paar Uhren, starte alle genau zu derselben Zeit und verteile sie auf die Satelliten und die Empfänger. Anhand vorbestimmter Zeitmarken kann man dann synchron die PRN-Codemuster erzeugen. Allerdings wäre selbst die Präzision einer Quarzuhr dafür bei weitem nicht ausreichend.
Deshalb hat man folgenden Weg beschritten:
Jeder GPS-Satellit erhält mehrere Atomuhren mit auf seine Reise, zwei Cäsium- und zwei Rubidium - Atomuhren. Dies bedeutet allerdings nicht, dass diese Uhren durch atomare Energie betrieben werden. Der Name kommt daher, dass eine bestimmte physikalische Eigenschaft der Atome genutzt wird und man damit die heute genaueste Uhr herstellen kann, zu einem Preis von über hunderttausend Mark pro Stück!
 Obwohl diese Uhren so genau gehen, dass in 30.000 Jahren eine Abweichung von maximal einer Sekunde zu erwarten ist, werden sie von der Erde aus kontrolliert. Sie laufen überdies ein ganz klein wenig langsamer, da man sogar die Relativitätstheorie berücksichtigen muss. Danach erfährt das vom Satelliten ausgestrahlte Signal bei seiner Annäherung an die Erde durch die Wechselwirkung mit der sich ändernden Schwerkraft eine scheinbare Frequenzerhöhung, die damit ausgeglichen wird.
Obwohl diese Uhren so genau gehen, dass in 30.000 Jahren eine Abweichung von maximal einer Sekunde zu erwarten ist, werden sie von der Erde aus kontrolliert. Sie laufen überdies ein ganz klein wenig langsamer, da man sogar die Relativitätstheorie berücksichtigen muss. Danach erfährt das vom Satelliten ausgestrahlte Signal bei seiner Annäherung an die Erde durch die Wechselwirkung mit der sich ändernden Schwerkraft eine scheinbare Frequenzerhöhung, die damit ausgeglichen wird.Für eine exakte Positionsbestimmung mit drei Satelliten bräuchte man im Empfänger ebenfalls eine Uhr mit "Atomuhrgenauigkeit". Dass dies weder von der Größe her (die kleinste Rubidium-Atomuhr ist immerhin noch so groß wie eine Kaffeemaschine, die Cäsium-Atomuhr noch größer) noch vom Preis unmöglich ist, war klar. Also musste eine andere Lösung dieses Problems gefunden werden.
Das Produkt dieser Überlegung benötigt zwar im Empfänger immer noch eine Uhr, aber die erforderliche Genauigkeit ist bei der Anwendung der folgenden Methode keine absolute mehr, sondern nur noch eine relative, d.h., die Uhr muss nur noch für die kurze Zeit einer Messung genau gehen, und die ist mit einfachen technischen Mitteln erreichbar.
Ein einfacher Trick!
Am besten lässt sich die Lösung des Uhrenproblems an einem zweidimensionalen Beispiel zeigen. Auf die dreidimensionale Positionsbestimmung ist es analog anwendbar. Wie gesagt, es handelt sich hierbei um das Prinzip, wie man den absoluten Gangfehler der Uhr im Empfänger eliminiert. Die Zweideutigkeit bei den sich schneidenden Linien wird dabei nicht berücksichtigt. Dieser zweite Schnittpunkt liegt in der Realität sowieso weit außerhalb der Umlaufbahnen der Satelliten und verliert seine Bedeutung bei Hinzunahme eines dritten Satelliten gänzlich (Abb. 6.13).
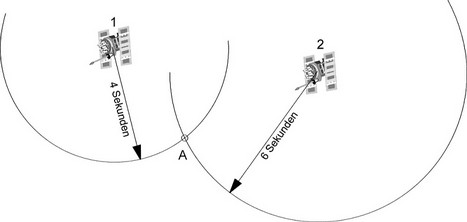
Nehmen wir zunächst einmal an, zwei Sender, in diesem Falle zwei GPS-Satelliten, senden zur gleichen Zeit ihren PRN-Code. Vom Satelliten mit der Nummer "1" sind wir vier Sekunden und von dem mit der Nummer "2" sechs Sekunden entfernt. Die beiden entsprechenden Funkstandlinien schneiden sich somit in Punkt "A", wo wir zunächst unsere Position vermuten.
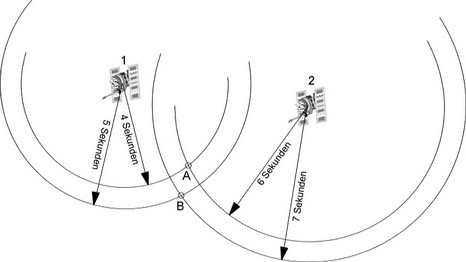
Nun nehmen wir wiederum einmal an, unsere "falsch gehende" Uhr im Empfänger erzeugt den PRN-Code, der mit den Satellitensignalen korrelieren soll, eine Sekunde zu früh. Dann addiert sich diese "Vorlaufzeit" zur tatsächlichen Signallaufzeit und unsere Position liegt somit scheinbar auf Punkt "B", wie Abb. 6.12 zeigt.
Diese Position wäre eine völlig andere und mit Sicherheit falsch. Der Fehler ist dabei proportional zur Ungenauigkeit der Empfängeruhr.
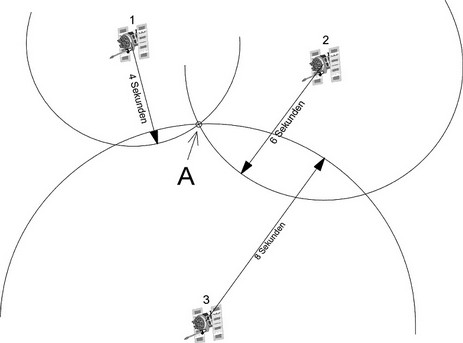 Jetzt nehmen wir noch einen weiteren Satelliten mit der Nummer "3" hinzu und messen hier die Signallaufzeit. Wir messen acht Sekunden und im Idealfall, das heißt bei exakt gehender Empfängeruhr, schneiden sich alle drei Standlinien auch tatsächlich im Punkt "A", womit unsere Position feststeht, bei genau gehender Uhr! Dies zeigt Abb. 6.13.
Jetzt nehmen wir noch einen weiteren Satelliten mit der Nummer "3" hinzu und messen hier die Signallaufzeit. Wir messen acht Sekunden und im Idealfall, das heißt bei exakt gehender Empfängeruhr, schneiden sich alle drei Standlinien auch tatsächlich im Punkt "A", womit unsere Position feststeht, bei genau gehender Uhr! Dies zeigt Abb. 6.13.Gehen wir bei dieser Betrachtung wiederum davon aus, dass unsere Empfängeruhr eine Sekunde vor geht, erhalten wir die folgende Situation mit drei Satelliten und einem Gangfehler der Empfängeruhr von plus einer Sekunde. Drei neue Standlinien ergeben die drei Schnittpunkte B, C und D.
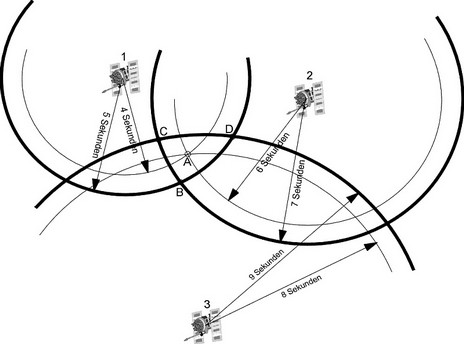
Nun können Sie bereits graphisch erkennen, wie sich die tatsächliche Position "A" trotz falsch gehender Uhr nicht verändert, wenn man sie in den Schwerpunkt des Fehlerdreiecks BCD setzt. Dafür müssen lediglich zwei Voraussetzungen erfüllt sein: die Uhr muss für die Dauer der drei Messungen eine kurzzeitige, jedoch hochpräzise Genauigkeit aufweisen und es muss immer ein zusätzlicher Satellit zur Positionsbestimmung mit herangezogen werden, also drei für eine zweidimensionale und vier für eine dreidimensionale!
Die tatsächliche Position A liegt also genau im Schwerpunkt dieses so entstehenden Fehlerdreiecks und kann durch ein wenig Rechenarbeit des Navigationsrechners (Lösung von vier Gleichungen mit vier Unbekannten pro Position) ermittelt werden. Und wenn Sie die ersten Kapitel dieses Buches aufmerksam gelesen haben werden Sie feststellen, dass es sich hierbei wiederum um ein ganz altes Prinzip handelt.
Da die Messungen weiterhin noch mit Zeitfehlern, bedingt durch die durch die Ionosphäre veränderten Signallaufzeiten behaftet sind, spricht man hier von Pseudoentfernungen. Die echten Entfernungen zum Satelliten werden erst durch umfangreiche rekursive Rechenoperationen und Fehlerkorrekturen mittels eines leistungsfähigen Mikroprozessors im Navigationsempfänger ermittelt.
Mindestens vier Satelliten für eine dreidimensionale Position
Wir haben also bisher festgestellt: Es sind mindestens drei Satelliten für eine zweidimensionale und vier Satelliten für eine vollständige dreidimensionale Ortsbestimmung notwendig.
Nun sind meist mehr als die notwendigen vier Satelliten am sichtbaren Himmel. Dann sucht sich der GPS-Empfänger die vier davon aus, die am symmetrischsten zueinander stehen und somit den kleinstmöglichen Positionsfehler erwarten lassen. Es ist nämlich durchaus nicht so, dass die Verteilung der sich ständig mit ca. 5 km pro Sekunde bewegenden Satelliten immer optimal ist. Gute Empfänger berücksichtigen diesen Sachverhalt, den man als "Dilution Of Precision" (Abschwächung der Genauigkeit) bezeichnet, versuchen dies zu optimieren und zeigen das Ergebnis als ein Qualitätsmerkmal in Form einer Note zwischen 1 und 10 auf dem Display des Navigationsempfängers an.
Leider besitzen die NAVSTAR-GPS-Satelliten eine weitere unangenehme Funktion. Die mit diesem System und dem C/A-Code theoretisch erreichbare Genauigkeit von 4 bis 20 Metern für die zivilen Anwendungen wird vom DOD absichtlich verschlechtert. Diese als SA bezeichnete Eigenschaft (SelectiveAvailability = selektive Verfügbarkeit) lässt eine sichere Positionsgenauigkeit von "nur" plus/minus 100 Metern zu. Meine eigenen Messungen mit dem GARMIN GPS 55 AVD haben gezeigt, dass langfristig die gemessene Position bis zu 100 Metern von der tatsächlichen abweichen kann. Die genauen Ergebnisse meiner Messungen finden Sie im Kapitel Positions- und Genauigkeitsmessungen mit dem GARMIN GPS-55 AVD weiter hinten in diesem Buch.
Es gibt sicher Geräte, von denen man eine noch präzisere Positionsgenauigkeit erwarten kann, da die SA nur "eine" Fehlerkomponente darstellt. Das Ziel meiner Messungen war es jedoch, festzustellen, ob ein Gerät von der Preisklasse des GPS 55 die vom Hersteller genannten Erwartungen erfüllen kann.
Bei GLONASS ist eine künstliche Verschlechterung bisher nicht vorgesehen und auch nicht bekannt.
Differential - GPS (DGPS)
Hersteller von Computersoftware machen sich Gedanken darüber, wie sie diese gegen Raubkopieren und sonstigen Missbrauch schützen. Hacker lassen sich etwas einfallen, um diesen Schutz zu umgehen. So hat auch die Industrie ein Verfahren entwickelt, das für viele Anwendungen die SA wirkungslos macht. Dieses verfahren nennt sich DGPS.
Die Positionsgenauigkeit, die man mit einem Differential-GPS-System erreichen kann, liegt bei weniger als einem Meter. Wertet man die Phase der Trägerfrequenz mit aus, sind sogar Positionsbestimmungen im Zentimeterbereich möglich.
Aufgrund der Tatsache, dass der Fehler zwischen der gemessenen und der wirklichen Position in einem Gebiet von mehreren zehntausend Quadratkilometern annähernd gleich groß ist, lässt sich das DGPS folgendermaßen realisieren: Man positioniert einen GPS-Empfänger ortsfest an einem sehr genau bekannten Ort. Die Positionsdifferenz zwischen diesem bekannten Ort und dem gerade ermittelten Messwert wird in Echtzeit, d.h. sofort, über eine Datenfunkstrecke an den Navigierenden übermittelt. Dessen GPS-Empfänger bzw. -Navigator korrigiert mit diesen Daten seine eigenen, ebenfalls in Echtzeit gemessenen Positionsdaten. Da die Fehler sich ständig ändern, wird die zu bestimmende Position um so genauer sein, je schneller diese Korrektur nach der Fehlerermittlung erfolgt.
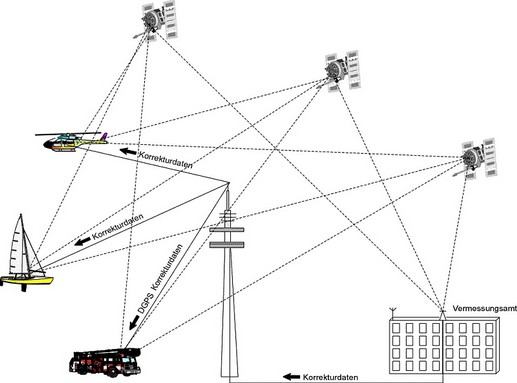 In Abb. 6.15 habe ich versucht, dies noch einmal graphisch zu verdeutlichen. Die GPS-Referenzstation auf dem Dach des Vermessungsamtes in Hamburg leitet über eine Standleitung die Korrekturdaten an einen Sender auf dem Heinrich-Hertz-Turm weiter, der sie dann den navigierenden Mobilstationen per Datenfunk zur Verfügung stellt. Ein bereits realisiertes Protokoll mit der Bezeichnung RTCM 104 (Real-Time-Correction-Message) wird von allen modernen, DGPS-fähigen, Empfängern verstanden und eine Korrektur somit automatisch durchgeführt.
In Abb. 6.15 habe ich versucht, dies noch einmal graphisch zu verdeutlichen. Die GPS-Referenzstation auf dem Dach des Vermessungsamtes in Hamburg leitet über eine Standleitung die Korrekturdaten an einen Sender auf dem Heinrich-Hertz-Turm weiter, der sie dann den navigierenden Mobilstationen per Datenfunk zur Verfügung stellt. Ein bereits realisiertes Protokoll mit der Bezeichnung RTCM 104 (Real-Time-Correction-Message) wird von allen modernen, DGPS-fähigen, Empfängern verstanden und eine Korrektur somit automatisch durchgeführt.Ob nun diese Korrekturen in der dargestellten Art erfolgen oder die von der Mobilstation ermittelten Positionen umgekehrt an eine Leitzentrale gesendet und dort mit den gemessenen Abweichungen einer Referenzstation korrigiert werden, ist von der Anwendung abhängig, vom Prinzip her jedoch dasselbe. Will eine Leitzentrale ständig wissen, wo sich ihre Fahrzeuge befinden, wird man letztgenannte Lösung wählen, da die Korrektur dann nicht mehr in jeder Mobilstation durchgeführt werden muss, sondern zentral erfolgen kann.
In Nordrhein-Westfalen wird zur Zeit (April 1995) ein weiterer DGPS-Testbetrieb durchgeführt. Über das Hörfunkprogramm WDR5 werden im Datenformat RTCM 104 GPS-Korrekturdaten über das RadioDataSystem (RDS) den GPS-Mobilstationen über das Autoradio zur Verfügung gestellt. Da die entsprechende Infrastruktur weitgehend vorhanden war, konnte man in kürzester Zeit über die UKW-Sender Bonn, Langenberg, Kleve, Münster und Teutoburger Wald fast ganz Nordrhein-Westfalen damit versorgen.
Nun besitzen UKW-Sender eine relativ begrenzte Reichweite. Deshalb wird Ende 1995 eine Langwellenausstrahlung auf 123,7 kHz mit dem Senderstandort Mainflingen Deutschland großflächig mit GPS-Korrekturdaten im RDS-Protokollformat versorgen. Dieser Dienst wird wahrscheinlich kostenfrei durchgeführt werden.
Da ein Potential von fast 40 Millionen Kraftfahrzeugen in der Bundesrepublik auf die Ausstattung mit einem GPS-Empfänger zur Landnavigation warten und die erforderliche Infrastruktur für eine Übertragung der Korrekturdaten zur Realisierung des DGPS weitestgehend vorhanden ist, hat die Zukunft der modernen Navigation für den Berufs- und Privatverkehr bereits begonnen.