
Mit diesem Kapitel möchte ich speziell die Leser ansprechen, die sich zum ersten Mal mit der Navigation beschäftigen. Dies soll kein Navigationslehrgang sein. Ich möchte nur die wichtigsten Grundbegriffe der Navigation erklären, die für das spätere bessere Verständnis der satellitennavigatorischen Eigenschaften wichtig sind. Daran anschließend erfahren Sie noch etwas über die konventionellen und heute durchaus noch üblichen Funknavigationsverfahren, bevor wir zum eigentlichen Thema des Buches kommen, der Navigation mit Hilfe des Global Positioning Systems.
Die Standlinie
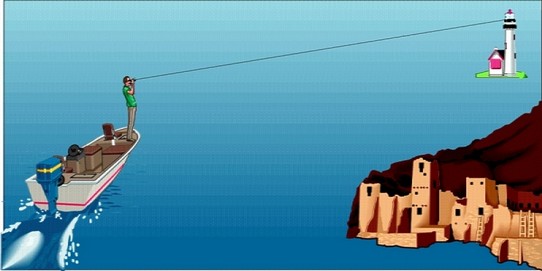 Meist wird eine gesuchte Position aus dem Schnittpunkt von zwei Standlinien ermittelt. Hierbei kann es sich z.B. um optische Standlinien handeln, welche man durch die Beobachtung ortsfester Ziele ermittelt hat. Solche Standlinien bezeichnet man als terrestrische Standlinien.
Meist wird eine gesuchte Position aus dem Schnittpunkt von zwei Standlinien ermittelt. Hierbei kann es sich z.B. um optische Standlinien handeln, welche man durch die Beobachtung ortsfester Ziele ermittelt hat. Solche Standlinien bezeichnet man als terrestrische Standlinien.Eine Standlinie muss allerdings nicht immer die Verbindungsgerade zweier Geländepunkte sein. Kreise, die Orte gleicher Entfernung zu einem bestimmten Geländepunkt (einem Rundfunksender) miteinander verbinden, werden als Funkstandlinien bezeichnet.
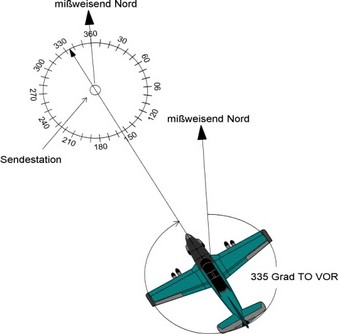
Mit einem Funk- oder Peilempfänger lässt sich eine Funkpeilstandlinie herausmessen, die der wahren Seitenrichtung zu einem ungerichteten Funkfeuer entspricht. Dieses Prinzip wird in der Luftfahrt bevorzugt bei der Navigation mit dem VOR angewendet. Durch den relativ geringen Preis von zwischen 2000 und 5000 DM war gerade der VOR-Empfänger bis zur Einführung des GPS das am meisten verwendete Funknavigationsgerät, insbesondere für die nichtkommerzielle Luftfahrt.
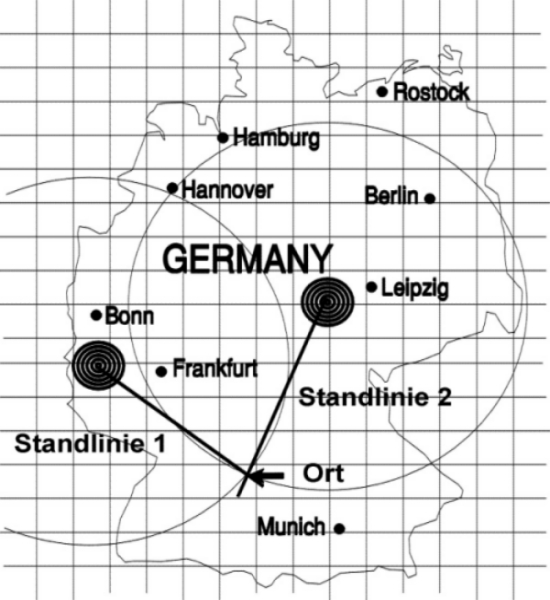
Weitere Funkstandlinien sind Linien, welche Orte verbinden, die dieselbe Entfernungsdifferenz zu zwei Geländepunkten besitzen. Diese Linien bezeichnet man als Hyperbelstandlinien, da sie der Geometrie einer mathematischen Hyperbel entsprechen. Sie bilden die Grundlage für die Funknavigationssysteme DECCA, LORAN und OMEGA.
Hyperbelnavigationsanlagen haben wegen ihrer großen Reichweiten besonders in der Seefahrt einen festen Platz eingenommen. Da diese beiden Systeme (UKW-Drehfunkfeuer und die Hyperbelnavigation) gerade für die privaten Anwender die bisher interessantesten Alternativen der Funknavigation waren (und sind), werde ich später noch genauer darauf eingehen.
Verlassen wir unsere gute alte Erde und ermitteln durch die Beobachtung eines oder mehrerer bekannter Sterne, des Mondes oder der Sonne in Bezug auf einen geometrischen Ort auf der Erde eine Verbindungslinie, so bezeichnen wir diese als astronomische Standlinie.
Im Jahre 1837 führte eine Zufallsentdeckung zu der Erkenntnis, dass ein Stern einen Kleinkreis mit dem Bildpunkt eben dieses Sternes auf der gekrümmten Erdoberfläche bildet. Mit dem Höhenwinkel als sphärischem Radius und damit der Messung der Gestirnshöhe über dem wahren Horizont lässt sich so eine Ortsbestimmung durchführen.
Fazit: Jede geometrische Linie, die einer für die Navigation auswertbaren Beziehung genügt, kann eine Standlinie sein.
Der Ort
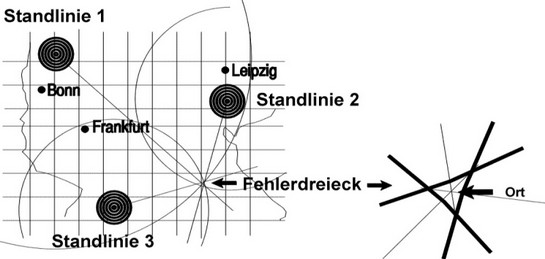
Das Ergebnis einer Peilung zur Feststellung der Position nennt man den Ort. Jede zweidimensionale Ortung erfordert als Minimum zwei Standlinien. Der oder die Schnittpunkte der Standlinien ergeben somit den Ort. In den wenigsten Fällen wird der wahre Ort mit dem gemessenen Ort exakt übereinstimmen. Um diese Ungenauigkeit (den Positionsfehler) möglichst klein zu halten, kombiniert man verschiedene Peil- bzw. Messverfahren oder ermittelt mehrere Standlinien. Im letzteren Fall erhält man (bei drei Standlinien) ein so genanntes Fehlerdreieck.
Der wahre Ort sollte in diesem Dreieck liegen. Durch die Halbierung der Innenwinkel des Fehlerdreiecks kommt man ihm so am nächsten.
Bewegt man sich während der Messung (Flugzeug, Auto), müsste man die Standlinien eigentlich gleichzeitig ermitteln. Da dies in der Praxis meist nicht möglich ist, muss man die einzelnen Standlinien möglichst schnell hintereinander feststellen. Der Fehler wird um so größer sein, je höher die Eigengeschwindigkeit ist und je größer die Zeitabstände zwischen den Standlinienermittlungen sind. Kennt man seinen eigenen Kurs und seine Geschwindigkeit, so kann man die erste(n) Linie(n) entsprechend verschoben zu den folgenden in die Karte einzeichnen, um zumindest diesen Ungenauigkeitsfaktor klein zu halten.
Die Richtung
Eine Richtung wird immer relativ zu einem Bezugspunkt, meist dem eigenen Ort, angegeben. Die Richtung
gibt normalerweise den Weg an, der zu einem gewünschten Punkt führen soll, die Bezugsrichtung dagegen kann für die Ermittlung der Richtung wichtig und z.B. eine Standlinie sein.
Eine der wichtigsten Bezugsrichtungen ist Rechtweisend (geographisch) Nord oder Missweisend (magnetisch) Nord. Dies sind die Standlinien vom Beobachtungsort zum geographischen bzw. magnetischen Nordpol.
 Kompassnord
Kompassnord ist die von einem Magnetkompass gelieferte Bezugsrichtung. Kreiselnord ist die bei einem richtungssuchenden Kreisel in seiner Ruhelage angezeigte Nordrichtung und Gitternord die Bezugsrichtung parallel zu einem Längengrad.
Kurse
Ein Kurs wird durch eine Winkelgröße zwischen der Längsachse des eigenen Flug- oder Fahrzeuges und einer Bezugsrichtung angegeben. Je nachdem, ob man aus einem Luftfahrzeug, einem Landfahrzeug oder einem Seefahrzeug navigiert wird man unterschiedliche Kurse benützen. So haben sich entsprechende Kursbenennungen herauskristallisiert, von denen verschiedene Untermengen für die einzelnen Verkehrssparten bevorzugt verwendet werden. Moderne GPS-Navigatoren können eine oder mehrere davon gleichzeitig auf ihrem Display darstellen.
Die wichtigsten Kurse in der Luft- und Seefahrt:
| Der missweisende Kurs | Winkel zwischen der aktuellen magnetischen Feldlinie und der Längsachse des eigenen Luft-, Land- oder Wasserfahrzeuges |
| Der rechtweisende Kurs | Winkel zwischen geographisch Nord und der Längsachse des eigenen Luft-, Land- oder Wasserfahrzeuges |
| Der Kompasskurs | Winkel zwischen magnetisch Nord und der Längsachse des eigenen Luft-, Land- oder Wasserfahrzeuges |
| Der Kurs über Grund | Winkel zwischen geographisch Nord und dem beobachteten Weg |
| In der Landnavigation kennen wir dagegen nur den Gitterkurs: | |
| Der Gitterkurs | Winkel zwischen Gitternord und der Längsachse des eigenen Landfahrzeuges |
Den Kurs, den man ausrichtet, um ein Ziel zu erreichen, nennt man Steuerkurs. Berücksichtigt man nicht Einflüsse wie Wind und/oder Strömung, erreicht man das gewünschte Ziel je nach der Größe dieser Einflüsse über eine so genannte Hundekurve. Durch Kompensation der Abtrift mittels entsprechendem Gegensteuern erreicht man sein Ziel auf dem kürzesten Wege, einer Geraden. Diese Korrektur bezeichnet man in der Luftfahrt als Vorhaltewinkel und bei einem Wasserfahrzeug als Beschickung.
Bei der Landnavigation braucht dieser Sachverhalt, auch wenn hier das Wasser keine und der Wind fast keine Rolle spielen, nicht berücksichtigt zu werden, da hier die Kurse i. d. R. durch die Straßenverläufe vorgegeben werden.
Die Bezeichnungen bzw. Benennungen der verschiedenen Kursdefinitionen in der Luftfahrt und in der Seefahrt sind sehr unterschiedlich. Dies hat zum einen historische Ursachen, zum anderen hat es praktische Gründe. Wind- und Strömungseinflüsse sowie die Nichtübereinstimmung der geographischen und magnetischen Pole sind weitere Ursachen für die verschiedenen Benennungen. Abb. 2.8 und die Tabelle 2.1 zeigen Ihnen grafisch und tabellarisch eine Übersicht über die Benennungen von Kursen in der See- als auch in der Luftfahrt.
| Tab. 2.1 | |||
| mwN | missweisend Nord | MN | Magnetic North (magnetische Nordrichtung) |
| rwN | rechtweisend Nord | TN | True North (geographische Nordrichtung) |
| MgN | magn. Nordrichtung | CN | Compass North |
| OM+ | Ortsmissweisung Ost | ||
| OM- | Ortsmissweisung West | ||
| rwK | rechtweisender Kurs | ||
| mwK | missweisender Kurs | ||
| KüG | Kurs über Grund | TT | True Track |
| KdW | Kurs durch das Wasser | ||
| BW | Beschickung für Wind | ||
| BS | Beschickung für Strom | ||
| BWS | Beschickung für Wind und Strom | ||
| d | Vorhaltewinkel | ||
Geschwindigkeit
Auch hier gibt es mehrere Geschwindigkeitsbegriffe.
Die wichtigsten davon sind:
| Die Grundgeschwindigkeit | Geschwindigkeit relativ zur Erde |
| Die Eigengeschwindigkeit | Geschwindigkeit gegenüber Luft oder Wasser |
| Die Windgeschwindigkeit | Geschwindigkeit des Windes |
wobei in der Landnavigation nur die Grundgeschwindigkeit relevant ist.
Im Gegensatz zur Landnavigation spielt die Windgeschwindigkeit und die Windrichtung in der Luft- und Seenavigation eine wichtige Rolle. Das Luft- oder Seefahrzeug erfährt je nach Windstärke und -richtung einen entsprechend großen Kursversatz, der durch eine Winddreiecksberechnung korrigiert werden muss. Im Winddreieck werden Windgeschwindigkeit und Windrichtung eingesetzt. Der Steuerkurs wird so gewählt, dass bei der vektoriellen Addition die Geschwindigkeit und Richtung über Grund in die gewünschte Kursrichtung weist. Beim Seefahrzeug ist eine zusätzliche Kurskorrektur durch den Einfluss der Wasserströmung nötig, die ebenfalls als korrigierender Vektor in das Dreieck eingebracht werden kann.
Bezüglich der Maßsysteme kennen wir bei den Längeneinheiten den Kilometer, die See- und die Landmeile. Bei den Geschwindigkeiten sprechen wir von Kilometer pro Stunde, Meilen pro Stunde oder Knoten. Wir Privatflieger benützen auch oftmals Kombinationen davon. So sprechen wir bei der Geschwindigkeit (wenn wir nicht nur "reine" Motorflieger sind) von km/h und benützen zur Angabe der Flughöhe das engl. ft (foot oder feet), da die Höhenangaben in den Luftfahrtkarten immer in dieser Maßeinheit angegeben sind.
Die Tabelle 2.2 gibt Ihnen eine Übersicht über die gebräuchlichsten Maßeinheiten und ihre Umrechnungen.
| Tab. 2.2 | |
| 1 Nautische Meile | 1,852 km |
| 1 Landmeile | 1,609 km |
| 1 Fuß (feet, foot) | 30,8 cm |
| 1 Knoten | 1,852 km/h |
| 1 mph | 1,609 km/h |
| oder umgekehrt: | |
| 1 km | 0,54 sm (naut. mile) |
| 1 km | 0,6214 Landmeilen |
| 1 m | 3,281 ft |
| 1 km/h | 0,54 Knoten (sm/h) |
| 1 km/h | 0,6214 mph (miles/h) |
Damit möchte ich das Kapitel über die Grundbegriffe der Navigation beenden, denn dies sollte eigentlich kein kompletter Navigationslehrgang werden. Mit diesem Kapitel als auch mit dem folgenden möchte ich nur eine gewisse Einstimmung auf das eigentliche Hauptthema erreichen.