
Für die Messungen der für die Navigationsrechnungen benötigten Größen wurden im Laufe der Zeit eine Vielzahl von Messgeräten entwickelt. In diesem Abschnitt möchte ich die gebräuchlichsten davon aufzählen und kurz ihre Eigenschaften erklären.
Je nach der zu ermittelnden Größe unterscheidet man zwischen Wegmesser, Geschwindigkeitsmesser, Richtungsmesser, Beschleunigungsmesser und Gyrator bzw. Kreisel. Sie alle nützen bestimmte physikalische Eigenschaften und Gesetzmäßigkeiten zur Messung von Zeit, Weg, Geschwindigkeit usw. aus.
Zur Anzeige der mit diesen Geräten ermittelten Werte gibt es drei verschiedene Grundformen von Anzeigegeräten: analoge Anzeigegeräte mit Rund- oder Bandskalen und beweglichen Zeigern, analoge Anzeigegeräte mit feststehenden Zeigern und beweglichen Skalen oder Digitalanzeigen. Je nach der zu interpretierenden Größe ist die eine oder andere Anzeigeform besser geeignet. Entfernung und Luftdruck werden deshalb bevorzugt digital angezeigt, Zeiten, Geschwindigkeiten und Richtungsänderungen analog.
Wegmessgeräte
So nennt man Geräte zur Messung des zurückgelegten Weges. Bei der Landnavigation mit Fahrzeugen kennen wir mechanische, elektromechanische, elektrische und optische Wegmessgeräte. Allen gemeinsam ist die Umsetzung einer mechanischen Drehbewegung, z.B. der Vorder- oder Hinterachse des Fahrzeuges, in ein Längenmaß und dessen entsprechenden Anzeige. Im einfachsten rein mechanischen Fall werden dabei die Umdrehungen eines Rades über eine Tachowelle auf einen mechanischen Zähler übertragen.
Beim elektromechanischen Wegmesser werden durch magnetisch betätigte Kontakte oder Halbleiter elektrische Impulse erzeugt, die in direktem Zusammenhang mit der Umdrehungszahl des Rades stehen. Diese werden einem Inkrementalzähler zugeführt, der den zurückgelegten Weg direkt und geeicht auf einem Zifferndisplay anzeigt. Beim optischen Wegmessprinzip wird die mechanische Umdrehung durch eine Lichtschranke detektiert. Auch hierbei erhalten wir elektronische Impulse als Eingangssignal für einen Inkrementalzähler.
Unabhängig vom gewählten Messverfahren hängt die Genauigkeit der Wegmessung vom Kontakt des Rades zur Straße ab. Durch starkes Bremsen und übermäßiges Beschleunigen entsteht durch die durchdrehenden Räder ein Schlupf, der das Messergebnis verfälscht. Durch Zuladung und wechselnden Reifendruck wird der wirksame Raddurchmesser direkt verändert. Auch die Radgrössenänderung durch unterschiedliche Geschwindigkeiten und der Einfluss des Straßenzustandes kommen als Fehlerquellen in Betracht. Diese Fehler können beachtlich groß werden, wenn man sie nicht dauernd durch andere Informationen, z.B. durch bekannte Wegpunkte, korrigiert. Eine unbewusste Korrektur ist bereits das Fahren mit dem Auto auf ausgebauten Straßen. Jede Kurve und jede Abzweigung sowie jeder Ihnen bekannte Ort stellt praktisch eine Information zur Kurskorrektur dar, die Sie meist unbewusst durchführen.
Da sowohl in der Seefahrt als auch in der Luftfahrt der direkte Kontakt zur Erde fehlt, kann man hier nicht den zurückgelegten Weg mit einem Wegmessgerät direkt messen. Statt dessen misst man in geeigneter Weise die Geschwindigkeit und berechnet den zurückgelegten Weg durch Hinzunahme der Zeit.
Geschwindigkeitsmessgeräte
Geräte zur Messung der Geschwindigkeit bezeichnet man als Fahrtmesser oder Tachometer. Bezieht man in die für die Wegmessung beschriebenen Messverfahren als weitere Größe die Zeit mit ein, erhalten wir die Geschwindigkeit. Bei einem Landfahrzeug wird dazu die Umdrehungsgeschwindigkeit des sich drehenden Vorder- oder Hinterrades gemessen. Dies erfolgt entweder mechanisch durch eine Wirbelstromscheibe oder elektrisch durch einen geeichten analogen oder digitalen Frequenzzähler. Fahrt- und Wegmesser sind bei einem Landfahrzeug meist in einem Gerät vereinigt.
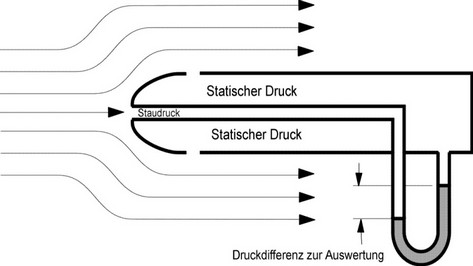
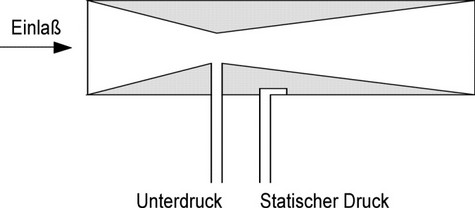
Bei einem Schiff wird die Geschwindigkeit im einfachsten Fall mit einer Propeller- oder Staudrucklogge, bei einem Flugzeug mit einem Pitot-Staurohr gemessen. Für langsam fliegende Flugzeuge (Segelflugzeuge) wird anstelle des Staurohrs eine Venturidüse (Saug- oder Unterdruckdüse) verwendet. Das Prinzip solch einer Düse zeigt Abb. 4.1. Durch eine Rohrverengung wird die Strömungsgeschwindigkeit erhöht. Der so erzeugte Sog wird an eine Druckmessdose zur Anzeige geleitet.
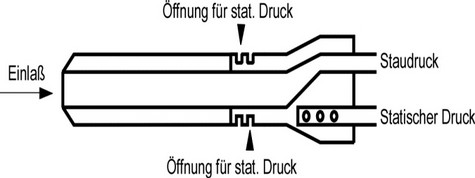
Im Gegensatz zur Staudrucklogge wird bei einem Flugzeug aus dem statischen Druck oftmals noch die Höhe bestimmt. Abb. 4.1 zeigt das Prinzip der Staudrucklogge für die Seefahrt, Abb. 4.2 ein Pitot-Staudruckrohr und Abb. 4.3 eine Venturidüse, wie sie in der Luftfahrt eingesetzt werden.
Pitot-Staurohr und Venturidüse befinden sich beim Luftfahrzeug an der Stirnseite des Seitenleitwerkes oder sonst einer Stelle geringster Luftturbulenzen. Über Druckschläuche werden die entsprechenden Drücke an die Fahrt- und Höhenmessgeräte geleitet. Diese bestehen aus Druckwandlerdosen, die über kleine Hebel und Getriebe die Druckänderungen in eine Achsendrehung umwandeln und auf ihren Skalen anzeigen.
Richtungsmesser
Das älteste und einfachste, aber auch mit vielen Fehlern behaftete Richtungsmessgerät ist der Magnetkompass. Man nutzt dabei einen physikalischen Effekt aus, bei dem ein magnetischer frei beweglicher Dipol sich in Richtung einer magnetischen Feldlinie ausrichtet. Dieses Prinzip wurde in Europa bereits um 1190 n.Chr. als Wasserbussole bekannt, jedoch schon vorher bei den Arabern und den Chinesen angewendet. Dabei handelte es sich um eine auf einem Strohhalm schwimmende Magnetnadel. Später wurde diese auf einer Metallspitze gelagert und findet in ihrer einfachsten Form noch heute als Marschkompass Verwendung. Eingeschlossen in einem flüssigkeitsgefüllten Gehäuse und mit einer halbkugelförmigen, die Skala tragenden Schale versehen, wird dieses drehbare Magnetsystem als so genannter Schnapskompass aus Sicherheitsgründen selbst in Flugzeugen mit modernsten Navigationsgeräten heute noch mitgeführt.
Da die magnetischen Pole der Erde nicht mit den geographischen übereinstimmen, beziehen sich alle mit einem Magnetkompass gemessenen Richtungen auf missweisend Nord (76° nördl. Breite und 100° westl. Länge) oder missweisend Süd (67° südl. Breite und 140° östl. Länge). Auf der nördlichen Halbkugel messen wir mit dem Kompass den Winkel zwischen missweisend Nord und der Fahr- oder Flugzeuglängsachse. Für die Genauigkeit der Messungen spielen neben konstruktiven Fehlern und magnetischen Störeinflüssen die Begriffe Deklination (auch Variation oder magnetische Missweisung genannt), Deviation und Inklination eine große Rolle.
Unter Deklination versteht man die Abweichung der Horizontalkomponente des erdmagnetischen Feldes vom geographischen Nordpol. Diese Linien gleicher Abweichungen (Isogone) sind in den Navigationskarten eingezeichnet. Da sich diese Abweichungen durch das bewegliche und flüssige erdinnere Magma mit seinem hohen Eisen- und Nickelgehalt zeitlich langsam ändern, bedarf es ständiger Kartenkorrekturen. Diese langzeitliche Veränderung wird durch eine kurzzeitige überlagert, die in den Karten allerdings nicht berücksichtigt wird. So wurden tageszeitliche Schwankungen gemessen, die im Sommer in Deutschland bis zu 15° betrugen. Auch magnetische Sonnenstürme tragen ihren Teil zur einer kurzzeitigen additiven Deklination bei.
Unter Deviation versteht man dagegen den Fehler (ausgedrückt in Winkelgraden) zwischen missweisend Nord und Kompassnord. Dieser Fehler ist in der Regel abhängig von der Richtung der Bezugsachse bzw. der Drehung des Fahr- oder Flugzeuges um seine Hochachse sowie vom Einbau und der Lage des Kompasses in der Nähe eisenhaltiger Teile. Durch einen möglichst großen Abstand zu diesen Störkomponenten und eine gewissenhafte Korrektur durch drehbare, schwache, im Kompass eingebaute Korrekturmagnete, lässt sich der Fehler auf 3 bis 5 Grad reduzieren. Die richtungsabhängigen Restfehler werden i. d. R. einmal gemessen und in einer Deviationstabelle, die in der Nähe des Kompasses angebracht sein sollte, eingetragen.
Unter Inklination schließlich versteht man den Neigungswinkel der magnetischen Feldlinien zur Erdoberfläche. Am Äquator ist dieser Winkel vernachlässigbar, wogegen er in Deutschland bereits etwa 60° beträgt. Dort, wo die Inklination 90° beträgt, befinden sich die magnetischen Pole.
Neigt sich ein Schiff zur Seite oder ändert sich die Fluglage eines Flugzeuges und ist in beiden Fällen kein kardanisch gelagerter Kompass vorhanden, entstehen mehr oder weniger große Anzeigefehler in Abhängigkeit von der Position und der Richtung der Flug- oder Fahrzeuglängsachse. Insbesondere beim Kurvenflug, beim Steigen oder Sinken eines Flugzeuges treten beträchtliche Fehler auf. Daher sollte man im Sichtflug vor dem Einkurven Richtungspunkte wählen.
So einfach, preiswert und betriebssicher ein Kompass ist, sollte man seine Fehler kennen. Es ist daher ratsam, gleich nach Beginn der Reise noch innerhalb seiner vertrauten Landschaft oder dem bekannten Gewässer den vom Kompass angezeigten Wert zu überprüfen. Ein zwischendurch unachtsam in Kompassnähe deponiertes Metallteil oder noch schlimmer, ein Kopfhörer mit seinen Magneten, kann eine totale Verfälschung der Anzeige hervorrufen.
Beschleunigungsmesser und Kreiselgeräte
Im 17. Jahrhundert fand Newton heraus, dass eine auf eine Masse wirkende Kraft eine proportionale zeitliche Geschwindigkeitsänderung in gleicher Richtung hervorruft (Newtonsches Gesetz). Dieses Prinzip führte zur Entwicklung von Beschleunigungsmessgeräten. Versucht man, eine so genannte Prüfmasse relativ zu dem sie tragenden Fahr- oder Flugzeug festzuhalten, so kann man aus dieser Kraft auf die Beschleunigung schließen.
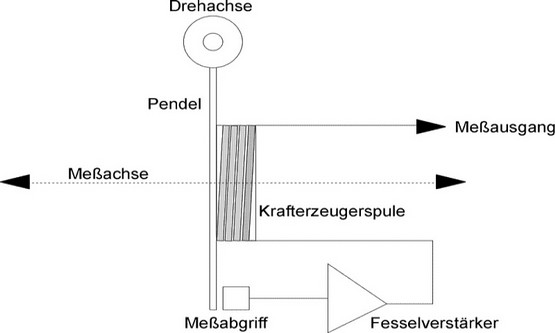
Bei den Ausschlagbeschleunigungsmessern wird die Prüfmasse durch eine Feder festgehalten. Bei bekannter Federkonstante kann man über den Ausschlag der Masse auf die Beschleunigung schließen. Für sehr genaue Messungen werden kraftkompensierte Beschleunigungsmesser benützt. Dabei wird eine Prüfmasse, die als Pendel ausgeführt ist, mittels eines elektrisch erzeugten Magnetfeldes festgehalten. Der dafür benötigte Strom dient als Maß für die Beschleunigung und ist ihr direkt proportional.
Um den Winkel zwischen einer Bezugsrichtung und der Längsachse eines Flugzeuges kontinuierlich zu messen, kann man Kurskreisel verwenden. Hierbei handelt es sich um die praktische Umsetzung des Präzessionsgesetzes in eine Apparatur, die jede Richtungsänderung messbar macht. Das Präzessionsgesetz besagt, dass man eine Winkelgeschwindigkeit erhält, wenn man ein "Moment" auf einen "Drall" einwirken lässt, wobei diese Winkelgeschwindigkeit senkrecht auf den beiden anderen Vektoren steht. Mit anderen Worten: versucht man, einen Kreisel quer zu seiner Laufrichtung zu bewegen, weicht er senkrecht dazu aus. (Versuchen Sie das einmal mit einer schnell laufenden Bohrmaschine. Sie werden diesen Effekt deutlich spüren).
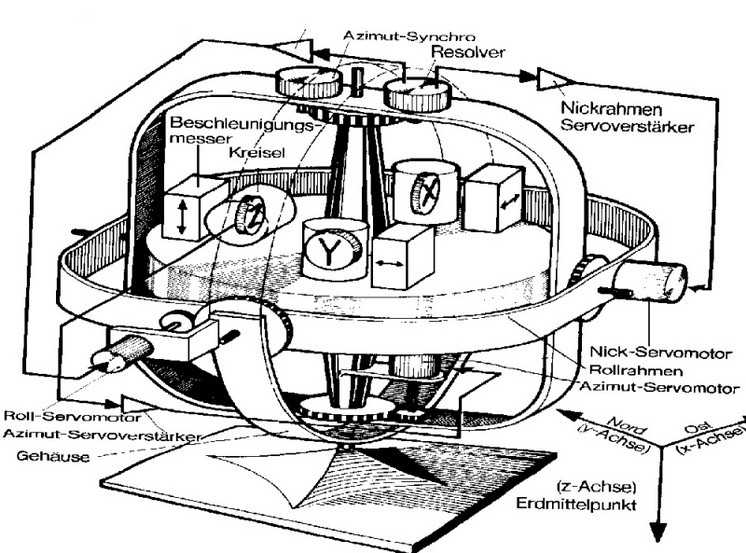
Um dies für alle drei Achsen gleichzeitig zu erreichen, werden verschiedene Kreisel zusammen mit Beschleunigungsmessgeräten auf einer Plattform angeordnet. Diese so genannte Inertialplattform ist in einem nach allen Richtungen frei beweglichen Rahmen so befestigt, dass sie unabhängig von der Lage des Flugzeuges durch Arbeitskreisel im Raum stabilisiert werden kann. Aus den Signalen der Beschleunigungsmesser mit zueinander senkrecht stehenden Messachsen berechnet ein Navigationscomputer fortlaufend die Position des Flugzeuges, unabhängig und ungestört von äußeren Einflüssen. Das Prinzip einer Inertialplattform haben Sie bereits weiter vorne in diesem Buch im Kapitel "Einleitung" kennen gelernt. Abb. 4.6 zeigt eine Inertialplattform mit drei Wendekreiseln nach Informationen der Firma TELDIX in Heidelberg.
Eine Navigationsanlage, bestehend aus einer Inertialplattform, einem Navigationsrechner und den dafür notwendigen Bedien- und Anzeigegeräten, wird als Trägheitsnavigationssystem bezeichnet. Trägheitsnavigationssysteme haben sich vorwiegend in der Luftfahrt bei Transatlantikflügen als Navigationsgeräte durchgesetzt. Ohne Funkwellenempfang und damit ohne Korrekturmöglichkeit durch Heranziehen eines weiteren Navigationssystemes können die sich aufsummierenden Fehler allerdings lange Zeit nicht korrigiert werden. Selbst bei einer Abweichung von 1 Grad pro Stunde entsteht nach einem zehnstündigen Transatlantikflug ein beträchtlicher Positionsfehler. Bodengestützte Funkfeuer sind jedoch bereits ab etwa 100 km vor der Küste des Zielkontinentes wieder zu empfangen. Spätestens dann ist eine Kurskorrektur wieder möglich.
Dem großen Vorteil einer autarken Arbeitsweise stehen die hohen Kosten und, wie bei der Koppelnavigation, die erwähnten, sich mit der Zeit aufsummierenden Positionsfehler entgegen. Außerdem kann dieses System nicht einfach eingeschaltet und betrieben werden. Zunächst müssen die Sensoren auf Ihre Betriebstemperatur aufgeheizt und die Kreisel auf ihre Solldrehzahl gebracht werden. Danach ist eine Ausrichtung der Inertialplattform und eine Kalibrierung des Gesamtsystems notwendig. Dies alles kostet Zeit. Erst dann ist das System betriebsbereit. Die Suche nach neuen Methoden zur Messung von Beschleunigungen und Drehbewegungen führte zur Entwicklung piezoelektrischer Beschleunigungsmessgeräten und Laserkreiseln.
Bei den piezoelektrischen Beschleunigungsmessgeräten wird die bei einer Beschleunigung der Prüfmasse auf einen Piezokristall einwirkende Kraft direkt elektrisch gemessen. Die Größe der so messbaren Spannung entspricht dabei direkt der Beschleunigung in Richtung der vorgesehenen Achse.
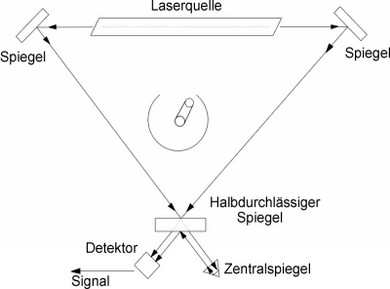
Abb. 4.7 zeigt den prinzipiellen Aufbau eines Laserkreisels. Das von einem Laser erzeugte Licht durchläuft eine optische Strecke (Spiegel oder Glasfaser) einmal in der einen Richtung und einmal dieser entgegengesetzt. Findet keine Drehbewegung um die Hochachse des Systems statt, ist die Differenzfrequenz der beiden an einem Detektor eintreffenden Lichtstrahlen null. Bei einer Drehung um die Hochachse jedoch wird sich während des Drehens für die eine Richtung die benötigte Wegstrecke verlängern, für die andere verkürzen. Abhängig von der Drehgeschwindigkeit läßt sich somit am Detektor eine Differenzfrequenz messen, die ein Maß für die Drehbewegung ist. Modernere Ringlasergyros, wie man diese Laserkreisel nennt, bestehen aus einem ausgehöhlten Glasklotz, in den die erforderlichen Spiegel eingearbeitet (aufgesprengt) sind. Solch ein hochpräzises optisches Gerät ist dementsprechend teuer. Aus diesem Grunde konzentriert sich die Entwicklung auf Glasfasergyros, die eine wesentlich preiswertere Herstellung versprechen.
In diesem Kapitel haben Sie einen Überblick über die gebräuchlichsten mechanischen und elektronischen Messgeräte zur Ermittlung der für die Navigation erforderlichen Größen erhalten.
Auch die Einführung der Satellitennavigation wird nicht das "Aus" für diese Messgeräte und die damit verbundenen Systeme bedeuten.
Erst die Kombination aller im Laufe der Entwicklungsgeschichte der Navigation gemachten Erfindungen und Konstruktionen und die damit verbundene hohe Redundanz machen die Navigation sicher. Das wird Ihnen auch das folgende Kapitel zeigen, in welchem ich die navigatorischen Möglichkeiten beschreiben werde, die es seit der Beherrschung der Funkwellen gibt, die Radionavigation.