Allgemeines
Wie ich bereits in der Einleitung zu diesem Buch bemerkte, möchte ich weder die am Markt erhältlichen GPS-Empfänger anhand ihrer Daten miteinander vergleichen, noch Kaufempfehlungen geben. In diesem Kapitel möchte ich Ihnen die notwendigen Eigenschaften und erforderlichen Komponenten eines GPS-Empfängers, unabhängig von Typ und Fabrikat, nahebringen.
Wie bereits erwähnt, ist das von den Satelliten empfangene Signal sehr schwach. Die mittlere Sendeleistung eines Satelliten beträgt etwa 20 Watt und die Entfernung zwischen Satellit und GPS-Empfänger etwa 20.000 Kilometer. Amateurfunk mit einer ähnlichen Sendeleistung im UKW-Bereich ist mit einer Rundstrahlantenne bei Sichtverbindung je nach Wetterlage nur bis etwa 200 km möglich. Und da eine GPS-Antenne die Signale mehrerer Satelliten gleichzeitig und unabhängig von deren Position am Himmel in jeder Lage empfangen können muß, kann sie nicht auf einen einzelnen Satelliten ausgerichtet werden. Deshalb muß sie so gebaut sein, daß das Antennendiagramm eine halbkugelförmige Charakteristik aufweist, d.h. die Signale aller am sichtbaren Himmel vorhandenen Satelliten sollten mit etwa derselben Signalstärke am Empfängereingang vertreten sein.
Für Stationäre Antennen wird dazu im einfachsten Fall eine genau definierte Kupferfläche auf eine Glasfaser- oder Teflonplatte aufgebracht und horizontal zur Erdoberfläche ausgerichtet. Mobile Geräte sind dagegen schon wegen der einfacheren Handhabbarkeit mit sogenannten Helixantennen ausgestattet, wie sie auch vom GARMIN GPS 55 verwendet wird. Sie ähneln einem vertikal auszurichtenden Zylinder, der unter einer schützenden Kunststoffhaube vier spiralförmige, genau auf die Empfangsfrequenz abgestimmte Drähte enthält.
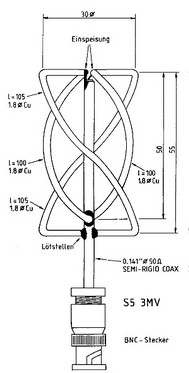
Solch eine Antenne nachzubauen, dürfte für einen geübten Bastler keine großen Schwierigkeiten bereiten. In [14] finden Sie dafür eine genaue Anleitung. Aus diesem Artikel stammt auch die hier abgebildete Zeichnung. Dieser Antennentyp mit rechtsdrehender zirkularer Polarisation wird auch häufig für den Empfang von Wettersatellitendaten der NOAA oder LEOS-Satelliten eingesetzt.
Wird die Antenne direkt oder über ein kurzes Kabel an den Empfängereingang angeschlossen, erübrigt sich ein Vorverstärker. Bei der Montage auf der Spitze eines Mastes (z.B. bei einem Segelschiff), kann darauf jedoch nicht verzichtet werden. Mittels geeigneter Antennenfilter, sog. Weichen, kann die erforderliche Betriebsspannung zur Speisung des Antennenverstärkers über das Antennenkabel zugeführt werden. Eine zusätzliche Leitung erübrigt sich somit.
Die am Empfängereingang anstehenden Signale werden nun zunächst in einem analogen Empfangsteil des GPS-Empfängers verstärkt und auf eine niedrigere Frequenz umgesetzt. Bis hierher ähnelt noch alles einem ganz normalen Kommunikationsempfänger und das Signal enthält noch unverändert alle Daten. Im anschließenden Signalverarbeitungsteil erfolgt die Signaltrennung und die weitere Aufbereitung nur noch digital.
Von der diskreten Schaltung zu digitalen Signalprozessoren (DSP) und Transputer
Wie üblich werden Ideen und Vorschläge zur Lösung von elektronischen Problemen nach deren Konzeption zunächst mit diskreten Bauelementen realisiert. Damit gewinnt man Erfahrung und spielt die ersten Geldbeträge ein, die zur Weiterentwicklung benötigt werden. Der Vorgang ist immer derselbe. Ob Videogeräte, Funkgeräte, Personalcomputer oder Satellitennavigationsempfänger: bei der Markteinführung ist noch alles groß, teuer und mit mehr oder weniger gravierenden Kinderkrankheiten behaftet.
Ich kann mich noch an eine für die damalige Zeit sensationelle Nachricht erinnern: Der Fahrer eines Kleinlastwagens wurde von einer Person dirigiert, die im hinteren, völlig abgeschirmten Teil desselben saß und dort einen GPS-Empfänger für mehrere zehntausend Mark bediente. Zusammen mit einem Stadtplan dirigierte diese Person den Lastwagenfahrer durch München an einen vorbestimmten Punkt, der auch tatsächlich erreicht wurde.
Der Selbstbauempfänger, der für beide Satellitensysteme (NAVSTAR und GLONASS) geeignet ist und in [15] beschrieben wird, ist durchweg noch aus konventionellen Bausteinen konzipiert. Dies ermöglicht dem Bastler bzw. Funkamateur noch einen Eigenbau. Kommerzielle Empfänger jedoch verwenden heute hochintegrierte elektronische Schaltungen, die speziell für die Kanaltrennung, Trägerverfolgung und Datenextrahierung der GPS-Signale entwickelt wurden. Rockwell und Plessey sind hierbei wohl die führenden Hersteller solcher Schaltungen.
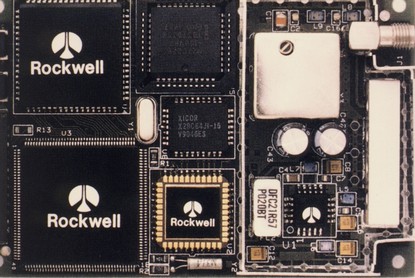
Das nächste Bild zeigt Rockwells NavCore © - GPS-Modul. Es wurde als Einbaumodul entwickelt und mißt nur 67 x 102 mm bei einer Höhe von 19 mm. Es ist für eine Positionsgenauigkeit von 25 Metern konzipiert und für seinen Einsatzbereich von bis zu 3600 km/h bestens für die Luftfahrt geeignet. Deutlich sieht man im rechten Teil den noch analogen Hochfrequenzteil (rechts oben die Buchse für den Antennenanschluß) und links daneben den Digitalteil mit nur fünf hochintegrierten Halbleiterschaltungen. Dieses Modul ist z. Zt. für etwa 400 $ erhältlich. Wer es preiswerter haben will, kann den ebenfalls von Rockwell gebauten MicroTrackerTM LP schon für 300 $ erwerben.
Anm: Stand: 1995 !!
Ziel des Navigators ist es, die Daten vom mindestens vier Satelliten für eine dreidimensionale Positionsbestimmung gleichzeitig zur Verfügung zu haben. Deshalb werden die noch analog vorhandenen Signale am Eingang des Digitalteiles auf vier parallele Kanäle aufgeteilt. Je nach Qualität (und Preis) des Empfängers kann dies relativ aufwendig durch die hardwaremäßige Realisierung mit vier Digitalen Signalprozessoren (DSP) oder durch die Verwendung von Multiplexern, die einen DSP nacheinander mit dem Vergleichscode von mehreren verschiedenen Satelliten füttert, geschehen.
Eine herausragende Entwicklung bietet hier GARMIN an, welche aus nur einem Signalprozessor und einem speziellen Multiplexer für die Auswertung von bis zu acht Satelliten besteht. Dieses als Multitrack© bezeichnete Verfahren ist preiswert und dennoch sehr effektiv. Es wird bei allen GARMIN-Modellen eingesetzt.
Die digitalen Signalprozessoren haben die Aufgabe, die Informationen eines bestimmten Satelliten aus dem Gesamtsignal herauszufiltern und zu separieren. Dies geschieht durch das bereits im Kapitel 6 angesprochene Verfahren der Autokorrelation. Zusammen mit dem lokal erzeugten Pseudocode, welcher dem des gesuchten Satelliten entspricht, ist dies möglich. Der hohe Aufwand an Rechenleistung, insbesondere für die GPS-Empfänger, die nicht nur die Satellitendaten, sondern auch noch das Trägersignal und evtl. sogar noch die zweite militärische Trägerfrequenz L2 verarbeiten, überfordert oft einen einzelnen Mikroprozessor. Hier kommen dann moderne Transputer zum Einsatz. Dabei handelt es sich um einfachere Mikroprozessoren, welche dann jedoch mehrfach vorhanden sind, entweder als externe Chips mit sogenannten Links zum Datenaustausch untereinander verbunden, oder auf einem einzigen Substrat integriert. Alle zusammen bilden ein vernetztes miniaturisiertes Rechnersystem, welches sich die anstehenden Aufgaben teilt.
Der Navigationsrechner
Die vom DSP aufbereiteten und für jeden empfangenen Satelliten getrennt vorhandenen Daten werden nun einem weiteren Prozessor, dem eigentlichen Navigationsrechner, zugeführt. Der Benutzer programmiert diesen (wie am Beispiel in Kapitel 9 gezeigt), d.h., er teilt ihm seine Wünsche mit. Aus den Satellitendaten unter Berücksichtigung der Benutzerwünsche werden jetzt an einem LCD-Display Kurse, Geschwindigkeiten, zurückgelegte Zeiten, voraussichtliche Ankunftszeiten, Kursabdrifte und vieles mehr angezeigt. Hier wäre ein Vergleich zwischen den verschiedenen Geräte möglich. Dieser kann sich jedoch nur auf den Bedienungskomfort und auf die Qualität und den Umfang der Anzeige(n) beziehen, weniger auf die Technik. Hier zeigt es sich, ob ein Gerät einfach oder schwierig bedient werden kann. Hier kann man prüfen, wieviel Wegpunkte und Routen gespeichert werden können. Hier läßt sich festlegen, ob und wie Daten über eine evtl. vorhandene Schnittstelle weitergegeben werden können und ob eine Programmierung des Gerätes auch z.B. durch einen Personalcomputer erfolgen kann.
Das GARMIN GPS 55 AVD
Es ist unmöglich, sich als "Privatmann" alle am Markt erhältlichen Geräte zu besorgen, zu testen und miteinander zu vergleichen. Dies soll auch nicht der Sinn dieses Kapitels sein. Ich möchte hier nur an einem Beispiel, nämlich am GPS 55 AVD, zeigen, was man heute von einem modernen GPS-Empfänger erwarten kann. Es ist ganz natürlich, daß verschiedene Geräte sich nicht nur in der Bedienung, in der Technik und im Preis unterscheiden, sondern auch in Gewicht, Größe, Ausstattung usw. Man sollte sich auf jeden Fall vor dem Kauf über die Möglichkeiten informieren, die solche Geräte heute bieten können. Je nach dem gewünschten Einsatzzweck kann man dann leichter seine eigene Kaufentscheidung treffen und weiß, welche Fragen man bei einer Vorführung des Verkäufers diesem stellen muß.
Für meine Kaufentscheidung waren vorzugsweise drei Geräteeigenschaften ausschlaggebend: ein gut ablesbares Display (große kontrastreiche Anzeigen), ein Datenausgang und ein erschwinglicher Preis. Somit fiel die Entscheidung auf das GARMIN 55 AVD, das zu diesem Zeitpunkt in zwei Ausführungen, ohne und mit Jeppesen Datenbank (AVD = Avionic Database), angeboten wurde.
Dieses Gerät ist gleichermaßen für den Betrieb auf einem Schiff, in einem Luftfahrzeug, in einem Kraftfahrzeug oder durch den wahlweise Batteriebetrieb auch unabhängig portabel für alle Arten von Wanderungen geeignet. Als Nachfolgetyp des GPS 50, welches primär für den Einsatz auf einem Wasserfahrzeug entwickelt wurde, hat man beim GPS 55 besonders darauf geachtet, es auch noch bei höheren Eigengeschwindigkeiten benützen zu können. War das GPS 50 allemal noch in einem Ultraleichtflugzeug zu gebrauchen, ist das neue jetzt für Geschwindigkeiten von über 1000km/h ausgelegt (lt. Hersteller bis 695 Knoten).
Die Darstellungen der Daten auf dem Display erfolgt zwar noch nicht graphisch wie beim GPS 95, doch wenn man Erfahrungen mit den Anzeigen von Flugzeuginstrumenten hat, wie sie bei der nichtkommerziellen Luftfahrt verwendet werden, fällt es nicht schwer, diese zu interpretieren.
Die NavCard ©
Personalcomputer wurden immer kleiner. Nach dem Desktop kam der noch relativ schwere (Sch)Laptop, dann das Notebook. Die neueste Entwicklung im Notebookbereich zur Werterhaltung und Erhöhung der Flexibilität sind die PCMCIA-Karten. Diese Personal-Computer-Memory-Card-Internati-onal-Association konformen Interfacekarten, welche den Computer um zusätzliche Speicher- oder Peripheriemöglichkeiten erweitern sollen, sehen aus wie Kreditkarten, nur etwas dicker. Mit Abmessungen von etwa 5 x 13 mm passen sie in einen am Notebook vorhandenen Schlitz.
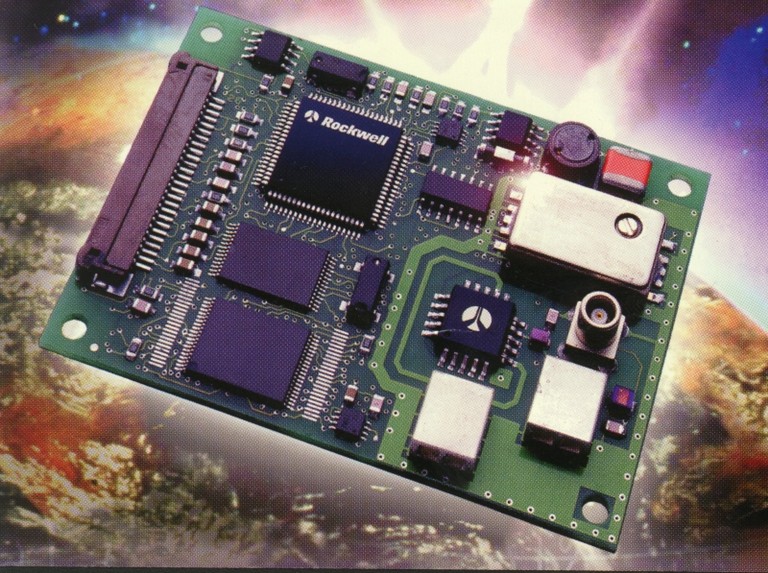
Der amerikanische Halbleiterhersteller Rockwell hat es nun fertiggebracht, als Weiterentwicklung seines NavCore©-Empfangsmoduls einen kompletten GPS-Empfänger in der Größe dieser PCMCIA-Karten und einem Gewicht von nur 90 Gramm herzustellen. In Verbindung mit einem Notebook und einer Software mit digitalisierten Karten könnte man denken, hier sei das Ende der Entwicklung erreicht. Doch lassen wir uns überraschen, wie die Entwicklung weitergeht.
Magellan, Apollo, Trimble, Sony und Co.
Diese Liste könnte man geradeso weiterführen. Außer diesen großen GPS-Herstellern beginnen nun auch andere Elektronikfirmen, die bisher nichts mit Navigation im engeren Sinne zu tun hatten, sich für das GPS zu interessieren. Lesen Sie dazu bitte auch das Kapitel 7, in dem ich Ihnen (nur) einige Beispiele ziviler Anwendungen aufgezählt habe.
Während ich diese Zeilen schreibe, erfahre ich von meinem Sohn, daß gerade im Fernsehprogramm ein Bericht über das GPS gesendet wird. Und auf dem Arbeitstisch eines Segelfliegerkameraden, der vor noch nicht allzulanger Zeit den Kopf schüttelte, als ich das Wort "GPS" in den Mund nahm, sah ich erst kürzlich einen Prospekt liegen, welcher ein Gerät zeigte, das einen für den Leistungssegelflug bereits seit Jahren eingesetzten Endanflugrechner nun mit einem integrierten GPS-Empfänger als absolute Weltneuheit anpries. Sollte er seine Meinung geändert haben ?
Die Moving-Map
Nun wurden natürlich nicht nur die Empfänger weiterentwickelt. Da Menschen im Zeitalter der Technik immer dazu neigen, alles noch perfekter zu machen, führte der nächste Schritt bezüglich der Anzeigemöglichkeiten über das graphische LCD-Display zur "Moving-Map".
Sofern man keine Platzprobleme für diese naturgemäß etwas größeren Anzeigegeräte hat, die entweder mit den Daten nach NMEA (siehe Anhang A) von einem vorhandenen GPS-Empfänger gefüttert werden oder bereits einen integrierten Empfänger "an Bord" haben, ist man hiermit auf dem neuesten Stand der Entwicklung.
Bei diesen Maps haben sich zwei Arten von Anzeigen durchgesetzt. Die eine stellt alle Daten (Karten- und Navigationsdaten) auf einem Display dar, die andere nur die sich ändernden, wobei die Karte als Bild hinter das durchsichtige Display geschoben wird. Im letzteren Fall ist die Darstellung gewohnter, da diese Karten vom Typ Land, See- oder Luftfahrtkarten sein können und man sich somit sofort wieder in gewohnter Umgebung befindet. Bei den Moving-Maps, die außer den Navigationsdaten auch noch das gesamte Landschaftsbild auf dem Display darstellen, ist ein großer Speicher eben für diese Daten notwendig. Daher sind die Landschaftsdetail auch sehr eingeschränkt.
Erst mit dem Einzug der Compact-Disk, bei denen eine Scheibe etwa 650 MByte an unkomprimierten Daten aufnehmen kann, und einem Farb-LCD-Bildschirm wird sich dies ändern. Doch dies hat noch seinen Preis.
Eine Alternative möchte ich noch erwähnen: Eine Kombination von Notebook mit Farb-LCD-Bildschirm, GPS-Empfänger und der dafür nötigen Software wird bereits angeboten. Sie nennt sich "Moving Terrain". Wie problemlos der Umgang in einem Luftfahrzeug damit sein wird, wenn es turbulent zugeht, muß sie noch beweisen. Außerdem läuft sie unter der Betriebssystemoberfläche Windows von Microsoft, die hoffentlich nicht gerade dann abstürzt, wenn sie unbedingt benötigt wird. Auf jeden Fall ist eine Stromversorgung über das Bordnetz des Luftfahrzeuges zu empfehlen, da die Notebook-Batterien auch nicht unbegrenzt das Gerät mit der notwendigen Energie versorgen können.
Die Abb. 10.3 und 10.4 (Quelle: Teldix Heidelberg) zeigen Ihnen zwei der erwähnten Moving-Maps, das Tracer GPSboard und den Teldix CoPilot, wobei die Fabrikate willkürlich gewählt wurden. Auch hier gibt es inzwischen mehrere Ausführungen und dementsprechende Hersteller.
Das TRACer GPSboard besitzt bereits einen eingebauten GPS-Empfänger und stellt alle erforderlichen Daten, sowie stilisierte Landschaftsmerkmale, Landebahnen, Funkfeuer usw. auf einem LCD-Display dem Benutzer zur Verfügung. Die regelmäßige Aktualisierung der nicht systemspezifischen Informationen, wie z.B. Funkfrequenzen und ICAO-Kennungen von Flugplätzen, erfolgt über eine auswechselbare Chipkarte.
Teldix geht mit seinem CoPilot einen etwas anderen Weg. Das durchsichtige LCD-Display dient lediglich der Anzeige eines Fadenkreuzes, dessen Schnittpunkt die aktuelle Position auf einer darunter eingeschobenen Karte anzeigt. Der eigentliche GPS-Empfänger ist nicht in diesem Kartengerät eingebaut, sondern kann an einer anderen Stelle befestigt sein. Die Navigationsdaten für den CoPilot werden über ein Datenkabel zugeführt. Leider hat Teldix sich auf ein spezielles Interfaceprotokoll von Trimble (TSIP) festgelegt, und nicht auf das übliche und universelle NMEA-Protokoll, so daß nicht jeder beliebige GPS-Empfängers dafür benützt werden kann.